

パラレルリンクロボットとは?おすすめパラレルロボット製造工場5選
目次
1.はじめに
工場の生産設備の省力化のために、ロボットを導入している工場はたくさんあります。ロボットにもロボットの種類、適用する箇所、動作する方法などは、設備によって皆異なります。さらに、ロボットの導入した結果、省力化の効果も異なります。
ロボットの種類には様々な型式があり、例えば、重量物を運ぶロボットでもいくつかの種類がありますが、どの型式のロボットが生産設備に合うかが悩むところです。それを解決する手段の一つは、ロボットの特徴を良く理解することでしょう。
また、適用事例を見て、自分の設備と似ている使い方があれば、ベストマッチングではないでしょうか。そのようないろいろなロボットの中から、このコラムでは、パラレルリンクロボットについて紹介します。
産業ロボットのうち、現在の主流の「垂直多関節ロボット」については下記の記事をご覧ください。
また、パラレルリンクロボットをラインに追加して、
- 省力化、省人化してコストダウンしたい
- 生産性アップして売上を上げたい
- 人的ミスを減らして品質価値を高めたい
- どのメーカーのロボットを使えば効率的かわからない
場合は、関東最大級のロボットSIer、FAプロダクツまでお問い合わせください。
また、安全に工場を稼働させ続けるためには、定期点検・保守・修理、老朽化した設備のリプレースが必要不可欠です。
FAプロダクツはそういったお客様のニーズにお応えし、手書き図面のデジタル化から緊急依頼まで幅広くサポート。
弊社が納品したもの以外の設備にもご対応いたします。
詳しいサポート内容や費用のお見積もりは、下記フォームまたはお電話にてお気軽にお問い合わせください。
お問い合わせ
老朽化「設備・産業PC」壊れる前に!保守・リプレースを代行、弊社が納品した設備以外も対象、手書きの図面のデジタルサポートなど
2.パラレルリンクロボットとは?
(1) シリアル・マニピュレータ
図1にロボットの代表格といってよいロボットのマニピュレータ部、シリアルリンクを紹介します。
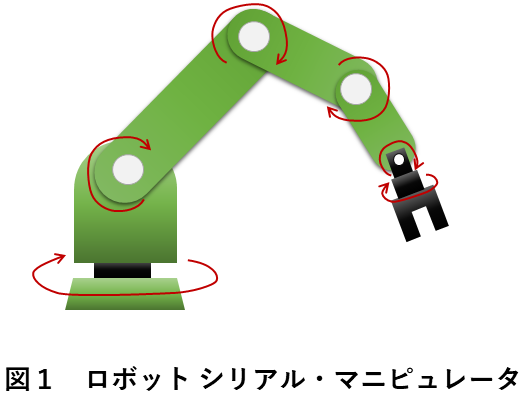
人間の腕をまねた構造のシリアルマニピュレータは、エンドエフェクタのある出力リンクとベースの間に、ジョイントを使って直列に連結しています。これによって、エンドエフェクタは遠くまで届くことができ、いろいろな角度をとれるため、省力化のための作業への貢献が大きく、シリアルマニピュレータは産業用ロボットの主流です。
(2) パラレルリンク・マニピュレータ
図2では、パラレルリンク型のマニピュレータを紹介します。
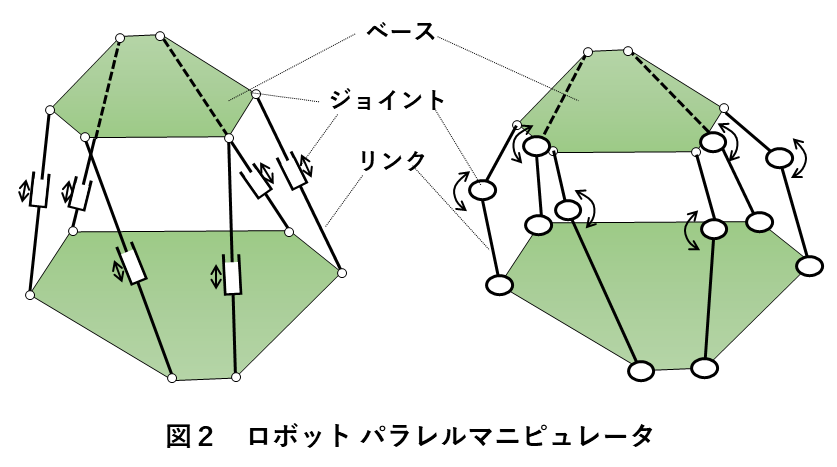
パラレルマニピュレータは、出力リンクとベースの問に、リンクとジョイントで作られる連結連鎖が、複数個並列に配置された機構です。パラレルマニピュレータを構成する連結連鎖のジョイントは、いろいろな型式があり、リンクとジョイントの組合せで、いろいろな動作を行うことができます。
(3) パラレルリンクの特徴
表1でパラレルリンクの特徴(メリットとデメリットを合わせた特徴)を紹介しましょう。
表1 パラレルリンクの特徴
| 大項目 | 特徴 |
| 作業範囲 | 作業領域は狭い |
| リンクの到達範囲、リンク間の干渉、ボールジョイント関節の可動領域の狭さによって作業範囲が制限されます | |
| 位置姿勢が保てません | |
| 精度 | エンドプレートの誤差は拡大します |
| ジョイントの誤差は平均化されます | |
| アクチュエータの制御誤差や負荷によるリンクの変形が、平均化されるため、高精度となります | |
| 剛性 | 複数のリンクで支持され曲げ応力が小さく剛性が高い |
| 加速度 | 慣性荷重の累積がなく、加速度が大きい |
| 最大力 | 複数のアクチュエータの合力で最大力は大きい |
| 運動解析 | ある入力に対する出力を求めることの解析は複雑に対し、ある出力に対する入力を求めることは容易です |
このようなパラレルリンクの特徴を活かしたロボットが、パラレルリンクロボットであり、その特徴が性能です。
3.パラレルロボットの適用例
(1) パラレルリンクロボットによる仕分け作業
図3で紹介するのは、ワークを、人手を使って仕分けする作業イメージです。
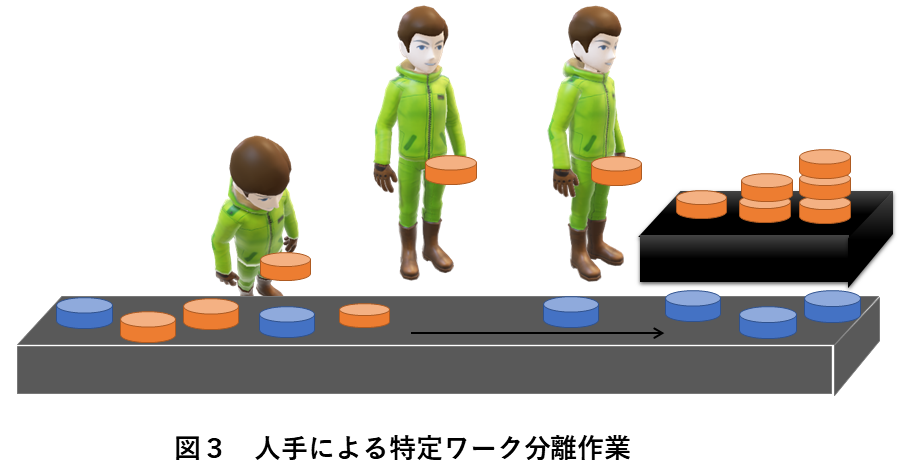
この仕分け作業に対して通常のロボットを使えない理由は、
- ワークに個体差がある。
- ワークの品種が多いため、そのたびに段取りし直す
- ワークが壊れやすく、人が処理する方が安全
などです。図4は、図3の仕分け作業を、パラレルリンクロボットを使って仕分けするイメージです。
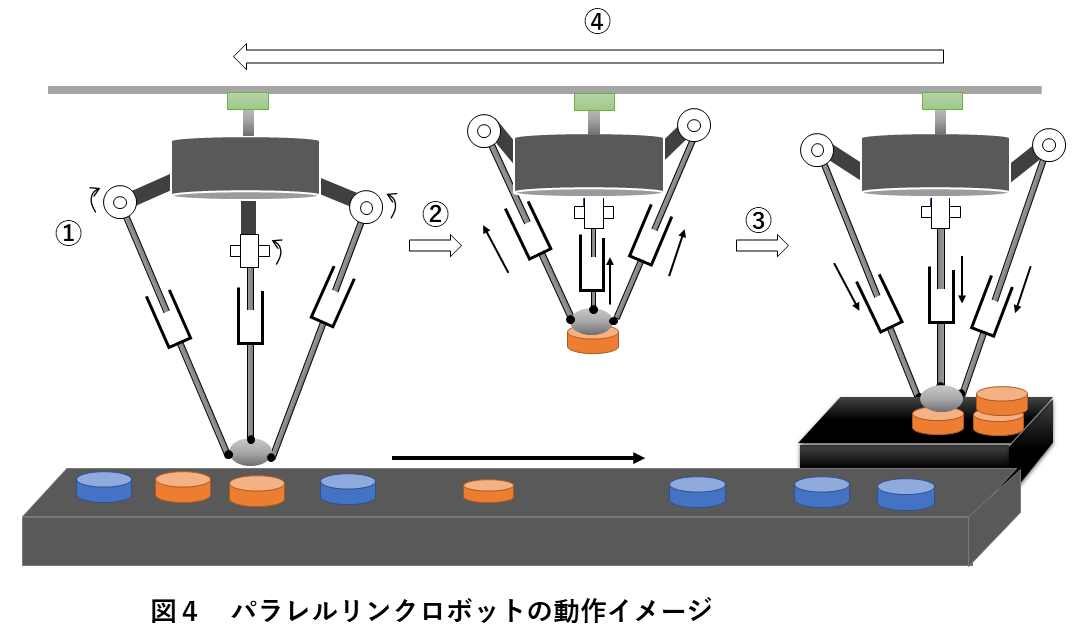
このロボットシステムでは、次の順序でロボットが動作します。
- ① ピックアップする
仕分けするワークを選別し、ワークを取り出します。 - ② ワーク持ち上げ
ピックアップしたワークを移動するため、リンクを縮小します。 - ③ ワーク仕分け
取り出したワークを仕分け置場に置きます。 - ④ ワークピックアップ場に再移動
再度仕分け用ワークを取り出すため、ピックアップ場に再度移動します。
(2) パラレルリンクロボットとビジュアルセンサーとのコラボ
図5では、パラレルリンクロボットとカメラシステムで共同して仕分け作業を行うイメージを紹介します。
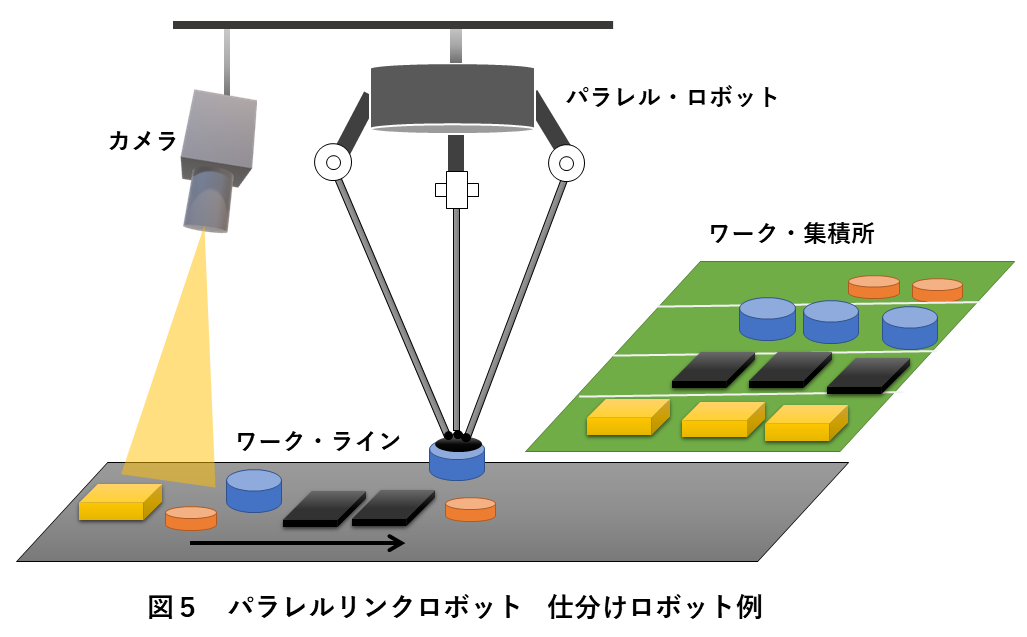
ワークの仕分け作業でも、図4のように簡単に選定できない場合、ロボットのほかに、目となるカメラシステムで、ビジュアルにワークの判定をする必要があります。
図5の場合、難しいことは、ワークの形・色などが微妙に異なることです。これらのワークを、ある範囲にある形と色のワークを、集積場の所定の置場に設置することが、パラレルリンクロボットと、カメラシステムのコラボ作業となります。
4.おすすめロボット製造メーカー5選
この章では、ロボット製造するメーカーでも、パラレルロボットを製造するメーカーをご紹介します。【特徴】では、メーカーの特記事項は省略し、製造するパラレルリンクロボットの特徴と関連する図について紹介します。
① 株式会社FAプロダクツ
【特徴】
FAプロダクツは年間200台もの実績がある関東最大級のロボットシステムインテグレーターです。一貫生産体制をとっており、設計から製造までをワンストップで対応。費用・時間にムダなく最適化を行うことができます。
また、お打ち合わせから原則1週間以内に「お見積りとポンチ絵」をご送付。
【ポンチ絵とお見積りのサンプル】
テキストやお電話だけでは伝わりづらいゴールイメージを共有し、スピード感を持った対応を心がけています。
また、同社の「画処ラボ」では、画像処理を用いた外観検査装置の導入に特化し、ご相談を受け付けています。従来は目視での官能検査に頼らざるを得なかった工程の自動化をご検討の際などにご活用ください。
業界最大級の画像処理検証施設を開設!
「画処ラボ」ではルールベースやAIの画像処理を専門エンジニアが検証。ご相談から装置制作まで一貫対応します。
【所在地】
茨城県土浦市卸町2丁目13-3
TEL.050-1743-0310(代表)
FAX.050-3156-2692(代表)
https://jss1.jp/
【営業品目】
- 産業用ロボット
- 生産設備合理化・省力化の設計及び製作
- 基板電気チェッカーや貼合・折曲など
- 治具の設計・製作
【実績】
NM社(電子部品の製造販売)、HS製作所(情報通信・社会産業・電子装置・建設機械・高機能材料・生活の各システム製造販売)、TT社(ショッピングセンターなどリテール事業)、SM社(自動制御機器の製造・販売)、OR社(自動車安全システムの製造販売)
② ムラテックメカトロニクス株式会社
【所在地】
滋賀県蒲生郡竜王町弓削37
TEL:0748-57-2000
【営業品目】
デジタル複合機の製造
制御盤、電子機器の設計・製造販売
FA機器・専用機の開発・製造販売
機械加工、板金加工・塗装、プラスチック成形の受託製造
磁気誘導式センサシステムの開発・製造
【特徴】
パラレルメカニズムロボット(MPS2)の特徴は次のようになります。
・搬送重量0.1kgで毎分180サイクル、1kgでは毎分120サイクルの高速稼働です。
・シンプルな機構で、高精度な位置決めが可能で、繰り返し精度は、±0.1mm以下です。
・直径1040mm、上下方向200mmまでの広い動作範囲です。
・可搬重量は、最大可搬重量2kgです。
・アームと旋回軸には、ムラテック独自技術で、軽量化と高剛性を実現するカーボンシャフトを採用し、軽量高剛性アームを実現しています。
・そのほか、耐久性、省スペース、安全性に優れています。
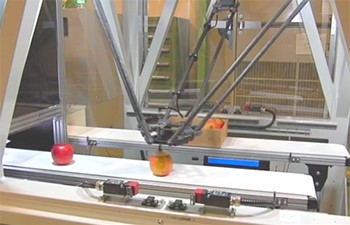

写真は、ムラテックメカトロニクス社製 パラレルリンクロボットによる、リンゴのピッキング事例(左)と、ラップ包装品のピッキング事例(右)です。
③ 株式会社ロボテック
http://www.robotec.tokyo/pc/index.html
【所在地】
東京都中央区日本橋久松町9-11
TEL:03-3639-6123
【営業品目】
電動トルクアクチュエータ「UNISERVO」及び各種ロボットの開発・製造・販売
【特徴】
パラレルリンクロボット(PL3-80)を製造しています。
3台の電動トルクアクチュエータを使って、ロボットを構成し、従来は難しかった押しつけ制御を可能としています。エンドエフェクタを直接手でタッチし、ロボットに動作手順を覚え込ますティーチングを、簡単にできることが特徴です。
また、2 台のロボットをローカル(手元操縦側)とリモート(遠隔作業側)とし、協調動作を可能としています。
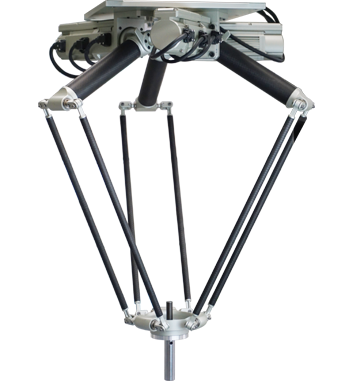
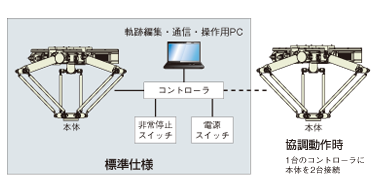
写真は、ロボテック社製パラレルリンクロボットPL3-80と強調動作時のイメージです。
④ パナソニック株式会社
(オートモーティブ&インダストリアルシステムズ社)
https://industrial.panasonic.com/jp
https://industrial.panasonic.com/jp/products/fa-welding/fa/fatp/parallel-link-robots
【所在地】
大阪府門真市大字門真1006番地
TEL:06-6908-1121
【営業品目】
車載
産業インフラ
ICT
FA・産業
医療
【特徴】
PLRシリーズとして、パラレルリンクロボットを製造しています。主要な機能を紹介しましょう。衝突を検知しワークの破損を防止する衝突検知機能、格子状配列の位置を指定するパレタイジング機能があり傾いたパレットでも対応可能です。
いくつものツールをチェンジレスで作業を継続できるマルチツール機能、認識結果によりオフセット動作を行う3D認識補正機能など多くの機能が特徴です。


写真は、パナソニック社製パラレルロボット(上)と、基板組立事例イメージ(下)です。
⑤ ファナック株式会社
https://www.fanuc.co.jp/index.html
【所在地】
山梨県忍野村
TEL:(0555) 84-5555
【営業品目】
FA商品:CNC、サーボモータ、サーボアンプ、レーザ
ロボット:協働ロボット、ミニロボット、スカラロボット、ゲンコツロボット、アーク溶接ロボット、中小型ロボット
ロボマシン:ロボドリル、ロボショット、ロボカット、ロボナノ
【特徴】
ファナック社のパラレルリンクロボットには、ゲンコツロボットシリーズとして、1号から3号まであります。
1号は小型高速組立ロボットで、2号は高速搬送・組立ロボット、3号が大型高速搬送・組立ロボットです。1号の特徴は、軽量でコンパクトな機構のため、狭い場所でも設置でき、また自由な傾斜角にも適用できることです。適用方法によって、手首の自由度と動作領域を選ぶことができ、パラレルリンク機構により俊敏な動作が実現できます。
2号ロボットの特徴は、1号機の機能に加え、食品分野の自動化に貢献できることです。
3号ロボットは、6軸タイプによりコンベヤを流れる複数のワークを、まとめて高速に整列搬送できる特徴を有します。


写真は、ファナック社製 パラレルリンクロボットと基板組立イメージ図です。
5.パラレルリンクロボット導入のご相談はFAプロダクツへ
このコラムではパラレルリンクロボットについてご紹介してきました。省力化のためのロボットには、パラレルリンクロボットを初めとして、様々な型式のロボットがあり、適用場所も、狭く小さな作業エリアで細かい作業を行うロボットから、広いエリアで重量物を扱うロボットまで様々です。
ロボットを設置するときには、どのような場所に、どのような使い方を、どのようなロボットをということを適切に決めなければなりません。従来の6軸自由度のロボットでワークの搬送をしようとしたが、場所の狭いところがあり、結局パラレルリンクロボットが最適だった、ということも起きて当然です。
工場のアプリケーションに合ったロボットを選択するときに、ロボットの適用経験が豊富な人に相談することがベストなソリューションではないでしょうか。幸いなことに、経験豊富で気軽に相談に応じてくれるロボットメーカーやコンサルタント社がたくさんあります。気軽に相談することで、後で「しまった」を言わなくて済むのではないでしょうか。
ロボッド導入をご検討の際は、お気軽にご相談ください。
またFAプロダクツは、定期点検・保守・修理、老朽化した設備のリプレースといったニーズにもお応えしています。
手書き図面のデジタル化から緊急依頼まで幅広くサポート。弊社が納品したもの以外の設備にもご対応いたします。
詳しいサポート内容や費用のお見積もりは、下記フォームまたはお電話にてお気軽にお問い合わせください。
お問い合わせ
老朽化「設備・産業PC」壊れる前に!保守・リプレースを代行、弊社が納品した設備以外も対象、手書きの図面のデジタルサポートなど
関東最大級のロボットシステムインテグレーター ロボットシステムの設計から製造ならお任せください
050-1743-0310 営業時間:平日9:00-18:00

