

6軸ロボットとは?座標系とティーチングの手法を徹底解説!
目次
1.はじめに
産業界においては、ロボット導入を前提とした工場の製造運営が図られています。
ロボットの大きさや機能も、その産業の業種や仕事の内容に合致したように、優れたロボットが製造されています。
しかし、ロボット投入が簡単にいかないのが現実でしょう。もちろん一番のネックは導入コストでしょうが、もっと深刻な問題は、プログラミングです。
ロボットは賢い機械ですが、賢さの原動力となる、機能を活かしたプログラムがなければ、ただの鉄くずとなってしまいます。
現代では、ベテラン作業者と同じことがロボットに要求されます。作業者の代わりにということでのロボット導入ですから、当然のことです。
作業者と同じことをするためには、ロボットも高機能化が要求され、6軸や7軸の自由度を持ったロボットの導入は当たり前となっています。
ここで問題は、6自由度のロボットを簡単に作業者に変えることができるかということです。そこで登場するのが、6軸ロボットをベテラン作業員になるように教育する、ロボットティーチングの手法です。
このコラムでは、6軸ロボットを中心に、ティーチングについて紹介します。
また、もし、6軸ロボットの導入にあたり、
- 省力化、省人化してコストダウンしたい
- 生産性アップして売上を上げたい
- 人的ミスを減らして品質価値を高めたい
- どのメーカーの自動化設備を使えば効率的かわからない
という場合は、お気軽にFAプロダクツまでお問い合わせください。
関東最大級のロボットSIerとして、最適化のご提案をさせていただきます。
2.6軸ロボットとは
図1では、自由度について紹介します。
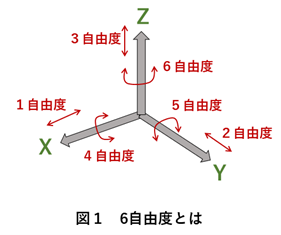
工場で作業する空間は3次元空間です。
3次元元空間で物体の位置と姿勢を直交座標系で表すと、X軸方向の1自由度、Y軸方向で1自由度、Z軸方向で1自由度、さらに、X軸周りで1自由度、Y軸周りで1自由度、Z軸周りで1自由度、全部で6自由度になります。
そのため、産業用ロボットの自由度が6あれば、工場内でのどのような作業でも、位置と姿勢を制御し、3次元空間で作業が可能になります。
図2では、6自由度をもったロボットを紹介します。
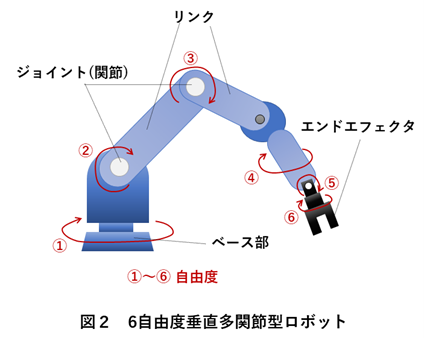
図2で紹介するロボットは、垂直多関節型の6自由度を持ったロボットです。
回転の軸を関節と言い、その間を接続する部分をリンクと言います。ロボットの先端は、エンドエフェクタが接続され、ワークを処理します。
処理の形態には、
- モノを挟み込んで移動させるもの
- 塗装剤を吹きかけるもの
- 溶接治具で溶接するもの
など、多彩です。
3.ティーチングとは
産業用ロボットを動かすには、作業にあった動作プログラムを作成する必要があります。
ティーチングとは、教えるという意味のとおり、産業用ロボットに作業の動作を記録させることです。
ロボットは、基本的にティーチングで記憶された動きに従って動作します。
これは、ベテラン社員が新人に作業手順などを教えるのと基本は同じです。
人は頭に手順を記憶しますが、ロボットは、作業の動きごとに、1つ1つ記憶装置に手順・座標などを細かく記録します。
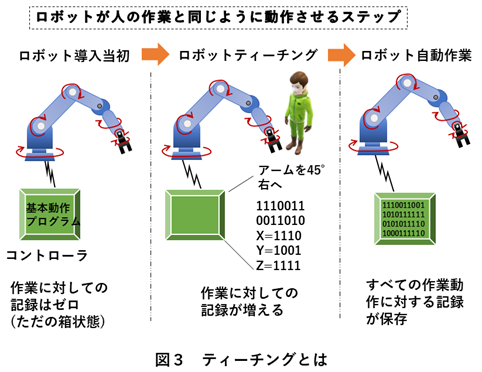
図3では、ティーチングについて図で紹介します。
工場の自動化、効率化のためにロボットに限らず、自動挿入装置などの自動化が進められてきました。
ロボットに期待することは、人が行うように作業をして欲しいということでしょう。
(1) 図3の左側
図3の左側は、ロボットを導入しただけという前提です。
これでは、ロボットを動作する基本のプログラミングはしていますが、工場のライン作業ができるかというと無理です。
(2) 図3の真中
次に、ロボットに対して、どのように作業を行うかをプログラミングすることが必要で、それがティーチングです。
ティーチングにはオンライン、オフライン、ダイレクトなどいくつかの手法があります。
ここでは、ダイレクトにロボットに人が付いて教示するとします。
図3の真中の図のように、ロボットに動作、例えばアームを45°右へ、と教えれば、アームを45°動かす前の状況から動かした後の状況、動かす過程などを記録します。
(3) 図3の右側
このように作業全体を教え、その結果をプログラミングし記録できれば、作業ロボットとして機能します。
図3の右側の状態がそれで、作業をすべてロボット単体に任さられます。
4.ロボットがワークを処理する方法
作業ロボットを導入しどのような作業を行うか、2つの異なる場面で、ロボットがどう動くかを見てみましょう。
(1) ワークが定位置に流れてくる場合
図4で紹介することは、ライン上を流れてくるワークをつかみ取る作業です。
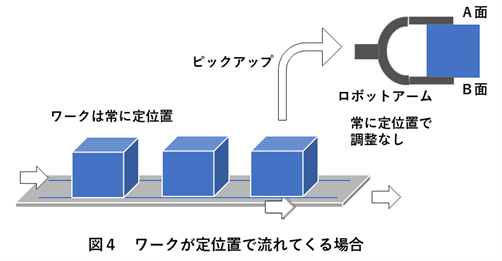
ライン上のワークは定位置に置かれて流れているものとします。
作業ロボットの役割は、このワークを1つずつピックアップし、所定の位置に移動させる作業とします。
ティーチングでは、ロボットはワークのA面とB面を認識し、アームに所定の力で挟んで、ピックアップすると教示しています。
ロボットが作業する上で大切なことは、プログラミングのほかに、センサー機能を充実させることです。
この作業の場合では、
- ワークが所定の位置にあることの確認
- ワークの掴む面を認識できること
- ワークの面を挟むときに、強い力でワークを壊さないこと
- 逆に、ワークの挟む力が弱く滑り落ちないこと
などです。
(2) ワークごとに位置がずれる場合
次に、図5で紹介することは、図4と同じ作業で、ワークをピックアップすることです。
しかし、この場合図4との違いは、ワークに位置が皆勝手な位置で流れてくるという点です。
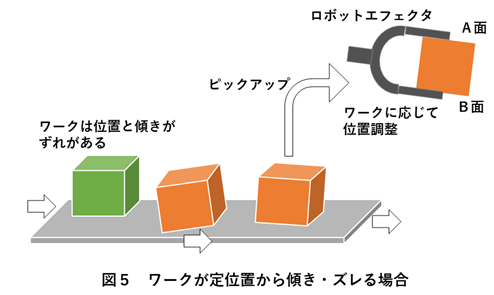
ワークがいろいろな位置にあるため、図4のようにロボットのアームを所定位置から降ろせばワークが掴める状況にありません。
そのため、次のようなステップで作業を行います。
- 作業ロボットは、A面とB面がどの位置にあるかを確認します。
- 例えばアームをY方向に25°右側に回転し、Z方向に10°上げればワークが掴めると判定します。
- 判定にしたがって、現在位置から、どの軸をどれだけ動かすかを計算します。
- アームをその位置にセットします。
- ワークをピックアップします。
- 次のワークに対しても同様の計算を行って、ピックアップします。
これらは、ティーチングされた通りの動作です。
5.6軸ロボットのティーチング例
前章までの例では、ライン上を1個づつ流れてくるワークをピックアップする作業ロボットを紹介しました。
この程度の作業であれば、ロボットに3~4軸の自由度があれば十分に対応でき、大きなコストは必要ないでしょう。
(1) ワークがいろいろな形で流れるときのロボットの作業
図6で紹介するライン作業は、同じようにワークをピックアップする作業です。
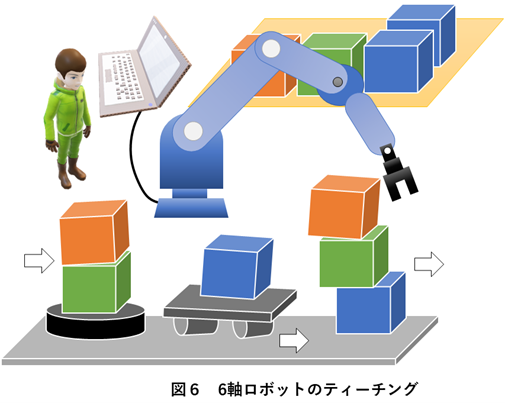
しかし、この場合は、ワークがいろいろな形状で流れてきます。
- ワークが数個積み重なったもの
- ワークが台車に乗ったもの
- ワークが台座上に何個か重なっているもの
このようなワークのピックアップ作業では、高さを認識して調整する必要があります。
さらに、その高さで、X,Y,Z軸方向に回転を加えた調整が必要になると想像できます。
このような作業に適した作業ロボットが、6軸自由度のあるロボットです。
(2) 6軸ロボットのティーチング
6軸ロボットに対してのティーチングは、次のようなことが例として考えられます。
- ワークの高さまでアームを移動する
- ワークの位置を検出し、挟む位置まで移動する
- ワークの挟む面、A,B面を捉える
- A,B面を挟んでピックアップする
- 置き場所までアームを移動する
- どの場合でもアームやリンクを移動するときは、周囲に危険を及ぼさないことを確認する
- 移動するときに最短の方法を計算して、記録する
(3) 6軸ロボットティーチングでの注意事項
6軸ロボットは工場の作業にはどのような作業にも適用できるため、導入したい機種でしょう。
しかし、6軸あるということは、6軸とそこに接続するリンク、多種に及ぶセンサーやモーターなどが必要です。
そのため1つの作業を終えるまでに、膨大な動作の繰り返しになります。
ティーチングではその動作一つづつプログラミングし、関連データをすべて記録する必要があります。
要は、非常に大変な作業が必要になるということです。
その代わり、完成すれば、すべてを作業ロボットに任せることができ、工場の効率化に寄与することでしょう。
6.ティーチングメーカー紹介
作業ロボットをティーチングするには、技術だけでなく、経験と実績が必要です。
さらにティーチングに長時間かけては、工場の停止時間の長さと、調整コストが膨大となるため、最短でできる技量が必要でしょう。
この章では、作業ロボットの経験が深いメーカー、ティーチングの実績のあるメーカーについてご紹介します。
①株式会社FAプロダクツ
【所在地】
茨城県土浦市卸町2-13-3
TEL:050-1743-0310
https://jss1.jp/
【特徴】
https://jss1.jp/service/robot/
本サポートシステム社は、ロボットシステム導入を支援するエキスパートです。
ロボットが正しく動作せるためには、ロボットシステムの組み込みが必要ですが、ロボットメーカーは通常はシステム構築は難しいという現実があります。
本サポートシステム社は、ロボットを導入する工場現場を実際に見て調査し、課題を分析し、設計から製造・メンテナンスまで一貫体制を整えて各先に提示します。
FA・ロボットシステムインテグレータ協会の会員であり、本サポートシステム社の掲げる「コネクテッドエンジニアリング」構想によってFA・ロボット業界の未来を牽引しています。(https://connected-engineering.com/)
FAプロダクツ社によるサポート体制は、遠隔サポートの導入により、トラブル時の迅速な初期対応が可能です。
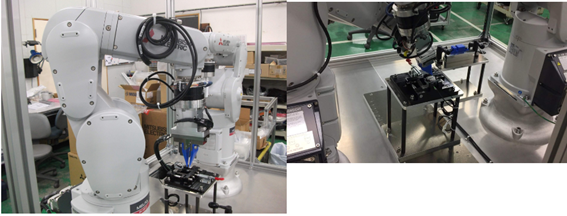
図は、同社事例の1つ「リード線はめ込み装置の製造事例」です。https://jss1.jp/pastwork/lead_inset/
もし、6軸ロボットのメーカー選びにお悩みの際は、幅広い産業用ロボットメーカーに精通する関東最大級のロボットSler、FAプロダクツまでお問い合わせください。
FAプロダクツは、年間200台もの実績がある関東最大級のロボットシステムインテグレーターです。一貫生産体制をとっており、設計から製造までをワンストップで対応。費用・時間にムダなく最適化を行うことができます。
お打ち合わせから原則1週間以内に「お見積りとポンチ絵」をご送付します。
【ポンチ絵とお見積りのサンプル】
テキストやお電話だけでは伝わりづらいゴールイメージを共有し、スピード感を持った対応をお届け致します。
【実績】
NM社(電子部品の製造販売)、HS製作所(情報通信・社会産業・電子装置・建設機械・高機能材料・生活の各システム製造販売)、TT社(ショッピングセンターなどリテール事業)、SM社(自動制御機器の製造・販売)、OR社(自動車安全システムの製造販売)
②株式会社MIRAI-LAB
【所在地】
名古屋市中村区名駅1丁目1−3 JRゲートタワー 43F
TEL:052-446-6377
【ロボット事業】
(1) 産業用ロボット
運搬、溶接、研磨、塗装、組立作業、生産工程などの産業ロボットの自動化が事業の柱です。
(2) ティーチング
MIRAI-LAB社には、経験豊富なティーチングマンが在籍し、各ロボットメーカーのスペシャリストが客先の要望に合わたロボット動作を構築しています。
同社では、工場でのティーチング作業だけでなく、PCを使ったオフラインティーチングも行っています。
https://www.mirai-lab.co.jp/business/

③株式会社ユニテック・アルファ
【所在地】
群馬県太田市内ヶ島町1096-1
TEL:0276-60-2244
【事業内容】
産業用機械の設計・製作
電気制御システムの設計・施工
レーザー加工・機械加工・板金加工
ロボットプログラム開発・ティーチング
制御盤製作・配線工事
オリジナル製品開発・販売
【ロボットティーチング事業】
産業用ロボットやメカトロニクス製品大手の安川電機製産業用ロボットのプログラム開発、ティーチングが得意とする業務です。双腕・7軸・6軸ロボット・各種外部軸のティーチングが可能です。実績として、ハンドリング・アーク溶接・スポット溶接・塗装・シーリングなどの用途のティーチングで実績があります。
ロボットティーチング派遣サービスで、客先と共同で開発を進めます。
図は、安川電機製HP-6ロボットが、額縁に沿ってシーリングを施すシステムのティーチング例です。
https://www.unitec-alfa.co.jp/works/robot/robot-02.html

④株式会社安川電機
【所在地】
北九州市八幡西区黒崎城石2番1号
TEL:093-645-8801
【事業内容】
モーションコントロール
ロボット
システムエンジニアリング
その他
【ロボット事業】
垂直多関節ロボットを主力製品として、次のようなさまざまな分野の生産現場の自動化に貢献しています。
●アーク溶接ロボット
●スポット溶接ロボット
●塗装ロボット
●ハンドリングロボット
●半導体・液晶製造装置用 クリーン・真空搬送ロボット
図は、アーク溶接に使われる垂直多関節型(7自由度)ロボットです。
https://www.e-mechatronics.com/product/robot/arc/lineup/ar1440e/spec.html

⑤ファナック株式会社
【所在地】
山梨県忍野村
TEL:(0555)-84-5555
【事業内容】
・NCとサーボ、レーザから成るFA事業
・基本技術を応用したロボット事業
・ロボマシン事業の三本柱に、IoTを担うオープンプラットフォーム「FIELD system」を加えた事業
・その他
【ロボット事業】
協働ロボット、スカラロボット、ゲンコツロボット、ミニロボット、アーク溶接ロボット、小型ロボット、大型ロボット、パレタイジングロボット、塗装ロボット、他
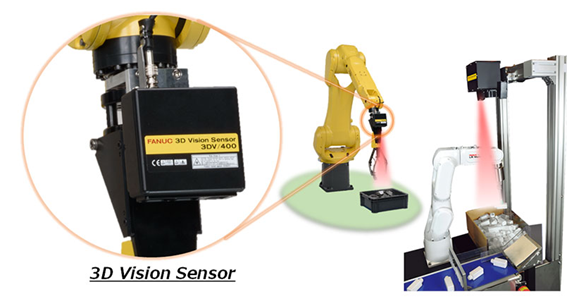
図はバラ積みロボットの機能を紹介した図です。
https://www.fanuc.co.jp/ja/product/robot/function/baradumi.html
7.おわりに
6軸ロボットは工場生産現場にとって、非常に有用な機械、機械というより作業員と言っても良いかもしれませんが、コストに見合えば是非設置したいものです。
しかし、問題は、作業員と同じレベルまでその技量を教え込めるかです。
教え込むには、作業員と同じ技量があって、ソフトウェア構築に経験の深い人でないと務まりません。人員的に余裕があれば、自社でティーチングマンを育てることが、今後の生産方法変更時の対応などを考えると、一番良い方法かもしれません。
しかし、現代の工場で、そのような人的余裕のあるところは、めったにないというのが現状ではないでしょうか。
そこで、ティーチングできる人を専門メーカーから招いて、6軸ロボットの動作を教え込む方法が、現実的な解法かもしれません。
幸い、ロボットメーカー、ロボットティーチング、ロボットインテグレータなど、ロボットに関わり、かつロボット技術に長けた会社が数多くあります。
これらの会社に気兼ねなく相談することで、今抱えている悩みや問題は、案外簡単に解決できるのではないでしょうか。
FAプロダクツでは、ロボットシステムによる自動化によってスマート工場を目指す製造業を支援しております。お気軽にFAプロダクツへご相談ください。
関東最大級のロボットシステムインテグレーター ロボットシステムの設計から製造ならお任せください
050-1743-0310 営業時間:平日9:00-18:00

