吸着搬送機の概要を導入事例と併せて紹介!メリット・デメリットも解説!
ライン上で、アームでのチャッキングによりワークが傷つかないようにしたい、サイズが異なるワークを搬送したい、などの悩みを解決したい時に思いつくのが「吸着搬送機」です。
今回は吸着搬送機に関する概要から導入事例、メリット・デメリットを解説します。
もし、吸着搬送機のコンサルティングを受けて、
- 省力化、省人化してコストダウンしたい
- 生産性アップして売上を上げたい
- 人的ミスを減らして品質価値を高めたい
- どのメーカーの自動化設備を使えば効率的かわからない
という場合は、お気軽にFAプロダクツまでお問い合わせください。
関東最大級のロボットSIerとして、最適化のご提案をさせていただきます。
業界最大級の画像処理検証施設を開設!
「画処ラボ」ではルールベースやAIの画像処理を専門エンジニアが検証。ご相談から装置制作まで一貫対応します。
お問い合わせ
老朽化「設備・産業PC」壊れる前に!保守・リプレースを代行、弊社が納品した設備以外も対象、手書きの図面のデジタルサポートなど
目次
1.吸着搬送機(バキュームシステム)とは?

(1)概要
吸着搬送機は、真空パッドなどによりワークを吸着し、別の位置に搬送する装置のことを指します。特徴は、ワークの天方向から吸着させて搬送させるため、ワークの形状に対して柔軟に対応しやすいという点です。
(2)仕組み
吸着搬送機の仕組みはとてもシンプルです。吸着パッドをワークに吸着させ、吸着パッドの内圧を負圧ポンプで大気圧よりも低い圧力とすることで、ワークに吸着パッドが吸い付く(差圧により外から内部に力がかかる)ことで搬送します。
以下の計算式により、吸着パッドの面積と吸着パッド内の負圧から、搬送することが可能なワークの重量を算出することができます。
| 搬送可能なワーク重量[kgf]=吸着パッドの面積[cm²]×吸着パッド内負圧[kgf/cm²] (換算:kgf/cm²=Pa÷9.81×10^-4) |
もしくは、吸着力を計算する際は単位を変えた以下式にて算出しましょう。
| 吸着力[N]=吸着パッドの面積[m²]×吸着パッド内負圧[Pa] |
この吸着力と吸着パッドの次に示す保持力が釣り合うことで、搬送することができます。
| 保持力 [N]= 質量 [kg] x (重力加速度 [9.81m/s²]+ a:パッド加速度 [m/s²]) |
搬送する際には、ワークの重量に加えて、パッドでワークを持ち上げる際の加速度も考慮する必要がありますので上式に加えています。
ここでの計算式は、あくまでも理論的なもので、表面性状やパッドの材質などにより必要な保持力は変化します。そのため、保持力が不足する懸念がある場合には、設計時に余裕を持った安全率をかけておきましょう。
2.吸着搬送機の導入事例

(1)物流倉庫での吸着搬送
完成品の段ボールや袋をパレット積みする作業を人が行なっているような物流倉庫では、その作業はとても高負荷な作業となっています。こういった重量物の搬送作業の補助として、吸着搬送機はとても有効です。
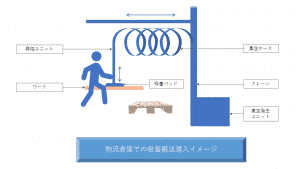
真空吸着ユニットとリフティングユニットを組み合わせることにより、物流倉庫での吸着搬送を導入することができます。
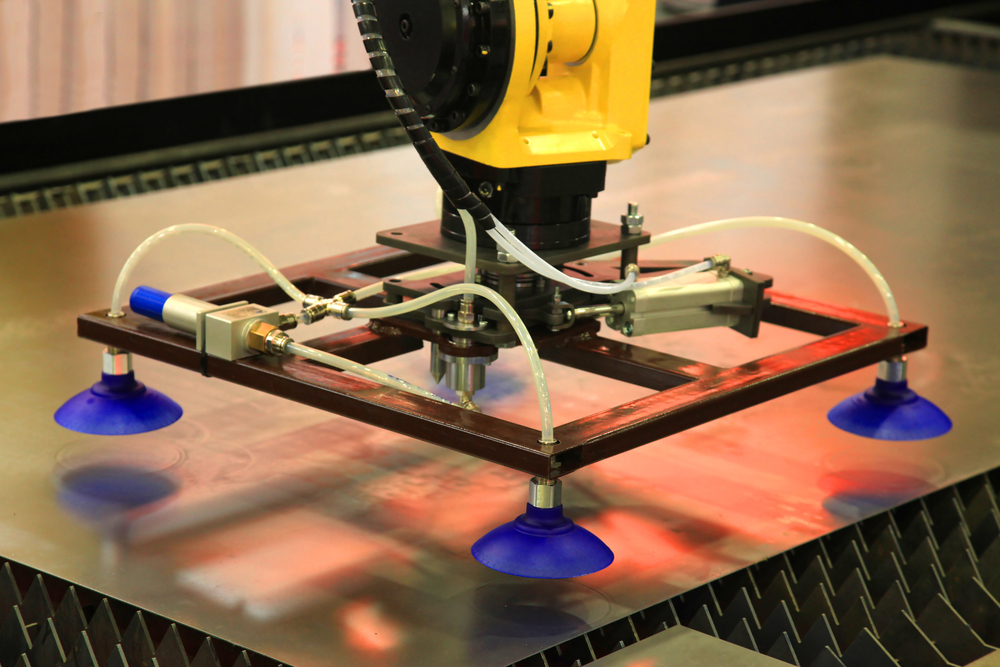
(2)大型加工設備での金属板搬送
大型の加工設備では、サイズや重量が大きく搬送しづらい金属板をフィーダーに入れる作業が必要となるケースがあります。こういったケースでも、サイズの大きい金属板全体に複数の真空パッドで吸着させることで、安定した搬送を行うことができます。
(3)パラレルリンクロボットとの組合せによる高速位置決め・整列
高速動作を得意とするパラレルリンクロボットと、真空吸着ユニットを組み合わせることにより高速位置決めをする導入事例もあります。ライン上でランダムに流れてくる製品を吸着することで、ランダムピッキングを行ったり、位置決めや整列作業を行う事が可能となります。
3.吸着搬送機のメリット

(1)複雑なワーク形状にも対応可能
吸着搬送機のメリットとして、複雑なワーク形状に対応しやすいという点が挙げられます。吸着搬送機は、天地方向の天側から吸着を行うため、側面や底面の形状影響を受けないことが特徴です。
吸着面は平面やある程度の局面であればパッド形状により吸着させることができます。
(2)サイズの大きい板物の搬送が得意
先の導入事例でも紹介した通り、金属板やガラス板などの搬送に用いられることも多いです。大きな板物の搬送が得意な点もメリットの1つと言えるでしょう。人が運ぼうとすると、どうしても変形させてしまったり、移動中にぶつけてしまいますが、吸着搬送機を用いることで、均一に吸着させながら、少ない力で搬送することが可能となります。
(3)ワークが傷つかない
製品搬送の際にチャッキングを採用すると、物理的に接触ワークを掴み、挟み込むことにより内部へ力を作用させ保持することになります。強度や硬度の低いワークである場合は、変形や傷がついてしまう可能性があります。こういったケースで、真空吸着等による搬送を採用することで、チャッキングよりも少ない力でワークを搬送することができ、変形や傷がない状態での搬送が可能となります。
4.吸着搬送機のデメリット

(1)水分や油分に弱いため、ワークの洗浄や装置メンテナンスが必要
吸着装置を使用する場合には、水分や油分に注意する必要があります。吸着面に水分や油分が付着していると、表面の摩擦係数が低下することで、ワークが予期せずスライドしてしまうなどのトラブルが発生します。そのため、前工程までにワークの水分や油分を除去することや、装置側の汚れなどが無いようメンテナンスが必要となります。
(2)装置サイズはワークサイズに依存しやすい。
先に紹介した動画からわかるように、真空パッド面はワークサイズとほぼ同じ大きさに設計されることが多いです。特にサイズの大きい板物などは変形を防ぐ目的で複数の吸着パッドで吸着させます。このようにワークサイズに真空パッドの吸着面サイズが依存して大きくなりやすい点はデメリットであるといえます。
(3)信頼性を上げるための事前の検証が高度
重量物の搬送などに吸着搬送装置を導入する場合には、落下などに対する吸着力の信頼性を検証しておく必要があります。チャック搬送の場合は、チャックやアームの剛性が、ワークの自重や加速度よりも十分に高くなりやすいため、形状をベースとした落下防止検証を行います。
一方で、吸着搬送装置では、吸着力や移動時の加速度以外にも、水分や油分による摩擦係数の低下や、砂やほこりなどの異物混入による吸着パッドのシール性不足など、故障モードの検討を行った上で、必要な吸着力を確保できることの検証が必要となります。
このように、事前の検証が高度となる傾向があるのはデメリットでしょう。ただし、このデメリットは、経験値のあるロボットSIerに任せれば安全・安心に導入できるため、解消しやすいと言えます。
5.吸着搬送機の導入・バキュームシステムにおすすめのメーカー・ロボットシステムインテグレータ3選
ここまで、吸着搬送機の導入事例からメリット・デメリットまで解説してきました。これらのメリット・デメリットを把握したうえで、もう少し具体的な自社工程への導入を検討したい方のために、ロボットシステムインテグレータを3社紹介していきます。
①株式会社FAプロダクツ

【特徴】
FAプロダクツは年間200台もの実績がある関東最大級のロボットシステムインテグレーターです。一貫生産体制をとっており、設計から製造までをワンストップで対応。費用・時間にムダなく最適化を行うことができます。
また、お打ち合わせから原則1週間以内に「お見積りとポンチ絵」をご送付。
【ポンチ絵とお見積りのサンプル】
テキストやお電話だけでは伝わりづらいゴールイメージを共有し、スピード感を持った対応を心がけています。
また、同社の「画処ラボ」では、画像処理を用いた外観検査装置の導入に特化し、ご相談を受け付けています。従来は目視での官能検査に頼らざるを得なかった工程の自動化をご検討の際などにご活用ください。
業界最大級の画像処理検証施設を開設!
「画処ラボ」ではルールベースやAIの画像処理を専門エンジニアが検証。ご相談から装置制作まで一貫対応します。
【所在地】
TEL.050-1743-0310(代表)
茨城県土浦市卸町2丁目13-3
FAX:029-840-2770(代表)・2771(設計)
https://jss1.jp/
【営業品目】
- 産業用ロボット
- 生産設備合理化・省力化の設計及び製作
- 基板電気チェッカーや貼合・折曲など
- 治具の設計・製作
【実績】
NM社(電子部品の製造販売)、HS製作所(情報通信・社会産業・電子装置・建設機械・高機能材料・生活の各システム製造販売)、TT社(ショッピングセンターなどリテール事業)、SM社(自動制御機器の製造・販売)、OR社(自動車安全システムの製造販売)
②三明機工株式会社

【特徴】
三明機工は、鋳造プラント材料の供給装置の自動化を足がかりとして、さまざまな工場FAを行ってきた会社です。鋳造やダイキャストの型物製品だけでなく、ディスプレイに使用される液晶ガラス基板の搬送システムも行っており、大型サイズのG10規格にも対応しており、大型の搬送設備を導入することを検討されている会社にはおすすめです。
【所在地】
〒424-0037 静岡県静岡市清水区袖師町940
TEL:054-366-0088(代)
FAX:054-366-0158
【営業品目】
- ロボットシステム&FAシステム
- ダイキャストマシン周辺自動化システム
- 鋳造プラント
- フラットパネルディスプレイ製造ライン自動化システム
- 産業用省力化自動装置
- 切断積載自動化装置
③シュマルツ株式会社

【特徴】
シュマルツ株式会社は、ドイツの真空メーカーで吸着パッドや真空発生器などの真空機器を中心に、ロボットのエンドエフェクタや真空バランサーなどの設備まで、真空に関する製品を幅広く対応しています。自社にロボットSIerを持っていて真空設備をこれから導入したい、といった要望がある場合にはおすすめのメーカーです。
【所在地】
〒224-0027 神奈川県横浜市都筑区大棚町3001-7
【営業品目】
- 真空吸着パッド、真空発生器、各種バルブ、圧力センサ等の真空機器
- 産業用ロボットのエンドエフェクタ
- 真空グリッパ-システム等のロボット向け吸着ハンド
- 手動搬送システム(真空バランサー、真空吸着式吊り具、クレーンシステム)
- CNC工作機械用真空クランプシステム
- 木工作業用真空チャック等の吸着固定製品
5.吸着搬送機の導入に関するご相談はFAプロダクツへ
吸着搬送装置の導入を検討している場合には、自社設備に適しているのかどうかという観点を検討する必要がありますので、ロボットSIerや真空メーカーに相談すると良いでしょう。
設備の設計からメンテナンスまで一貫して行うFAプロダクツは、他社の設備でもリプレースのご相談が可能です。お困りの際はぜひ、お気軽にご連絡ください。
関東最大級のロボットシステムインテグレーター 生産設備の設計から製造ならお任せください
050-1743-0310 営業時間:平日9:00-18:00

