エンドエフェクタとは?種類やおすすめ主要メーカー25選
エンドエフェクタは、近年さまざまな場面で活躍するロボット技術の一部で、人でいうと「指先」にあたる部分を指します。
製造業や医療現場で用いられるだけでなく、宇宙で活躍する最新技術でもあります。
この記事では、エンドエフェクタの種類から、選定ポイントや活用事例について解説いたします。
エンドエフェクタのコンサルティングを受けて、
・省力化、省人化してコストダウンしたい
・生産性アップして売上を上げたい
・人的ミスを減らして品質価値を高めたい
・どのメーカーの自動化設備を使えば効率的かわからない
という場合は、お気軽に株式会社FAプロダクツまでお問い合わせください。
関東最大級のロボットSIerとして、最適化のご提案をさせていただきます。
目次
1.エンドエフェクタとは
ここでは、エンドエフェクタの概要と種類を解説します。
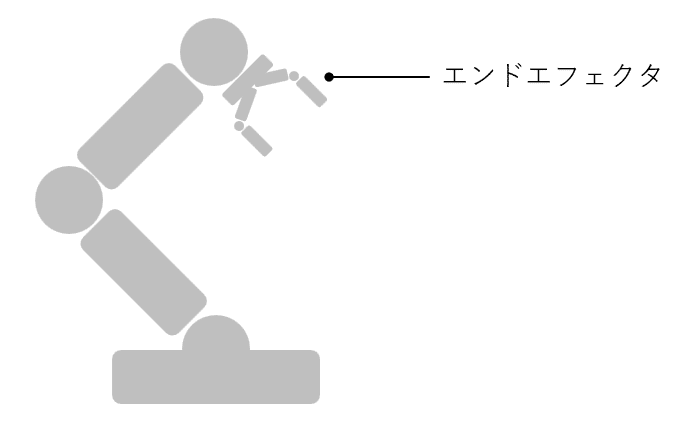
(1)エンドエフェクタとは
エンドエフェクタはロボットハンドやグリッパーとも呼ばれ、ロボットアームの先端に取り付けられる機器です。掴む・運ぶ・加工する・支える、といった作業を行います。
従来、人が行ってきた作業をエンドエフェクタに代替することで人手不足をカバーすることもできますが、それ以上に、人で行うことができないような重量物の取り扱いや長時間稼働、過酷な状況での利用に役立てることで、より効果を発揮することができます。
製造業での生産ラインや物流倉庫への導入も多く、近年大きな問題となっている人手不足の解消や自動化することによる生産性向上が期待されております。
(2)エンドエフェクタの種類
主なエンドエフェクタの種類として、次の3つを紹介します。
・把持(はじ)ハンド
・吸着ハンド
・磁力ハンド
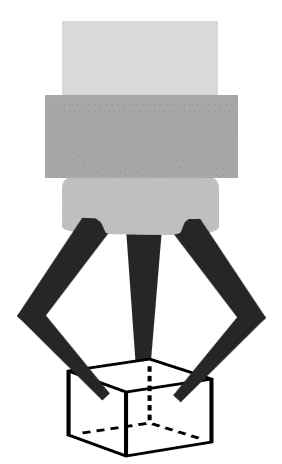
①把持(はじ)ハンド
「把持(はじ)」とは「しっかりと握り持つ」という意味です。
把持ハンドはその名の通り、人の指のように数本の爪を持ち、爪を開閉することで対象物をしっかりと握ることができるエンドエフェクタです。
一般的に爪は2~4本あります。動力は電気・圧縮エアー・油圧などが挙げられ、握る強さやスピードによって使い分けられます。
把持ハンドのメリットとデメリットは以下の通りです。
| メリット | 爪の形状や材質、本数を変えることで、さまざまな対象物に対応可能 |
| デメリット | 対象物によっては傷をつけたり、形状を歪めたりすることもある |
把持ハンドの素材はさまざまありますが、たとえばブリヂストンでは人の手の柔らかさや自由度とロボットが持つ強さと精確さを兼ね備えた把持ハンドを新しいテクノロジーとして開発しています。これまでのエンドエフェクタと比べて自由度が格段に上がり、取り扱うことができる対象物の範囲や活躍場面がグッと広がります。
【参考動画】
②吸着ハンド
吸着ハンドは、真空状態を作ることで対象物を掴むエンドエフェクタです。
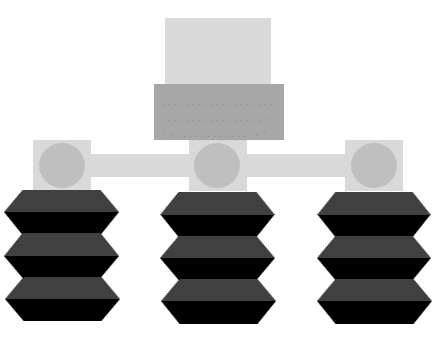
| メリット | 爪を動かす必要がないため、把持ハンドと比べてスピードが速い |
| デメリット | ・対象物との間に隙間ができないように接触させる必要があるため、平面的なものしか扱えない ・吸着部を増やすことで把持力を高められるが、強く吸着しすぎると痕が残ってしまう場合がある |
③磁力ハンド
磁力ハンドは、電磁石によって対象物を吸着させる方式のエンドエフェクタです。
電流のON/OFFによって磁力を変化させます。
| メリット | 対象物の形状を問わず吸着させることができる |
| デメリット | 対象物が鉄やニッケルなどの磁性体に限られる |
銅やアルミ、オーステナイト系のステンレスは吸着させることができないため、注意が必要です。
【関連記事】

2.エンドエフェクタの分類:専用ハンドと汎用ハンド
以下は、専用ハンドと汎用ハンドの特徴をまとめています。
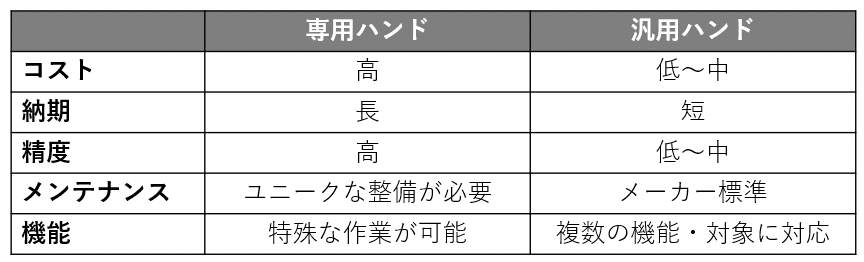
以下でそれぞれを解説します。
(1)専用ハンド
専用ハンドとは、ある特定の対象物や特定の作業に特化して設計・製作されたエンドエフェクタです。
例えば、ネジ締めや溶接、塗装などのある生産工程のみの機能に特化したものや、特殊な形状の製品に併せたものがあります。職人技とされていた属人的な業務の継承も可能になるかもしれません。
対象物や対象の操作に合わせてオーダーメイドで製作されるため、対象物を掴み損ねるリスクが低く安定的な稼働が見込まれます。一方で、設計のコストが高くなり、導入までの期間も長くなるデメリットがあります。
(2)汎用ハンド
汎用ハンドとは、多くの対象物に広く対応して把持・支持などの複数の機能を持つエンドエフェクタです。
例えば、それぞれのメーカーが標準品として販売しているエンドエフェクタです。
作業精度は専用ハンドに比べて劣りますが、設計コストが最小限に抑えられ、導入期間も短く、メンテナンスも比較的容易であるという特徴を持ちます。
3.エンドエフェクタの活用事例
現在、多くの業界・業種の製造業企業において、少子高齢化による人材不足や熟練作業員の技術継承といった経営課題を解決する目的で、エンドエフェクタの活用が進んでいます。
ここでは、エンドエフェクタの活用事例を4つ紹介いたします。
(1)機械部品の加工工程
従来、作業者が手で行っていた工作機械への材料投入や取り出し作業などをロボットに代替させた例が多くあります。
機械部品の位置決めに繊細な調整が必要であったり、設置スペースも限られるなど制約が多いケースでは、専用ハンドを開発し自動化を実現する事例も少なくありません。
作業の高速化から労働生産性が向上、不良品率の低下など良好な結果が期待できます。
【参考動画】自動車工場における溶接工程にロボットを導入した事例
(2)医薬品の包装工程
医薬品は、錠剤や注射剤といった投与可能なものを個包装し、品目ごとに特殊な個包装が求められるほか、注意事項を記載した用紙を個包装箱に同封するような細かな作業が求められます。これらの作業を専用ハンドを設計したロボットが行うようになった事例が増えています。
これにより、連続稼働時間が伸び、期間あたりの生産数量を増大させることに成功しています。
また、抗がん剤の混合調整などこれまで薬剤師が行っていた作業をロボットによって自動化したことで、より正確かつ調整者の暴露防止に役立っている事例もあります。
【参考動画】ロボットによって薬剤調整作業を自動化した事例
(3)物流業界での積み替え工程
物流業界での導入例です。
物流業界では、対象物の向きがそろっていない状態で取り扱うこともあり、その中には重量物も含まれるため、作業者の負担が大きくなっていました。
そこで、対象物の位置や向きがバラバラでも最適な掴み方ができるように、ビジョンシステムと組み合わせた制御方式を開発することで、バラ積みにも対応した自動工程を実現できました。
ブリヂストンスポーツ株式会社の物流倉庫で行っている実証実験の様子を確認することができます。
【参考動画】
引用:【ブリヂストン ソフトロボットハンド】物流現場でのピースピッキング実証実験の様子を公開
(4)宇宙空間での探索作業
最後に、最新技術として、に利用されているエンドエフェクタがあることを紹介します。
2022年にGITAI Japanによって開発された宇宙空間での探索ロボット「シャクトリ虫」型ロボットアームGITAI Inchworm One(IN1)は、両端に取り付けられた「グラップルエンドエフェクタ」が最大の特徴です。
複数の作業を実施する機能を持ち先端部分の交換も容易で、給電しながら宇宙空間、例えば月面での掘削作業や資源採取を遠隔で操作できるようになりました。
【参考動画】
【関連記事】

4.エンドエフェクタの選定ポイント

自社にロボット技術を導入しようとしたとき、どのようにエンドエフェクタを選べば良いのか、ここでは選考基準となるポイントを紹介します。
(1)対象物の特徴
取り扱おうとしている対象物の材質や形状によって、エンドエフェクタの種類の向き不向きがあります。
吸着ハンドはパッドと対象物の隙間を真空にすることで持ち上げるため、表面に凹凸があるものや穴が開いているものには向きません。
磁力ハンドの場合、対象物は磁性を持つものである必要があります。
把持ハンドで柔らかいものや薄いものを掴むことは難しい場合があるでしょう。
このように、対象物の材質や形状によって適切な種類が異なるため、あらかじめ自社が対象としている物質の特徴を把握することが重要です。
(2)可搬重量と可搬スピード
エンドエフェクタによって持ち上げられる重量が異なります。
把持ハンドであれば、力を強くすることで把持力を強め重量物を持ち上げることもできますが、対象物の損傷リスクも高まります。吸着ハンドの場合は、パッドを増やすことで持ち上げられる重量も高めることができますが、その分の面積が十分に確保できるのか、確認する必要があります。
生産ラインに導入する場合は、エンドエフェクタの可搬スピードはラインの生産速度よりも速くする必要があります。
強い力で持ち上げれば可搬スピードもあげることはできますが、その分対象物に加わる力が大きくなるため、損傷や落下のリスクが高まるでしょう。
エンドエフェクタごとに、把持できる可搬重量を十分に確認し、メーカーが保証している範囲内で選定し、使用しましょう。
(3)制御精度
エンドエフェクタの爪の位置や把持力を調整する機能があるかどうかも重要なポイントです。作業内容によって、高い精度で制御する必要がある場合もあり、設定値に対する再現性が悪いと、作業を中断することになりかねません。
位置や力などの設定値に対する仕事の精度と、設定を細かく調整できるかどうかを事前に確認しておきましょう。
(4)周囲環境
安全柵やグローブボックスのような囲まれた空間で導入する場合は、エンドエフェクタの可動域や対象物を扱う時の角度など、さらには駆動源のユーティリティについても十分に確認しておく必要があります。
確認を怠るとたとえば以下のようなトラブルが起きる可能性もあり、そうなれば余計なコストや修正時間が必要になってしまいます。
| ・隅にあるワークをピッキングできない ・安全柵に接触して止まってしまう ・エンドエフェクタが必要とするエアー圧力レベルや電源容量を既存設備では足りない |
(5)メンテナンス性
エンドエフェクタは、装置の継ぎ手部分や対象物との接触が避けられないため、摩耗などの経年劣化は必ず発生します。
特殊な保守が必要な場合は、その分コストや期間も必要になるため、常時稼働させることが前提のエンドエフェクタに対して、どのような保守がどの程度の頻度で必要なのかを事前に確認しておくことが重要なポイントです。
また、場合によっては長納期の部品などは予備品などを保有しておくことで、突発のトラブルに対応することもあります。
5.エンドエフェクタの主要メーカ25選!
ここでは、エンドエフェクタの主要メーカーをご紹介します。
| OnRobot Japan株式会社
|
【特徴】 世界中に展開するグローバル企業。ロボットハンドで複数のワークを実行できる費用対効果が高い製品や、安全に関する有効性を担保する「TUV認証」を受けている製品を持つ。 【会社概要】 ・所在地 〒108-0073 東京都港区三田1-3-40 天翔オフィス麻布十番 ・お問い合わせ 03-6433-7568 引用:https://onrobot.com/ja |
| 因幡電機産業株式会社
|
【特徴】 商社とメーカーの機能をあわせもつ技術商社。協働ロボットなどの製品を企業のニーズに合わせて提案するほか、ロボットの導入に必要なさまざまなサービスを提供する。 【会社概要】 ・所在地 〒550-0012 大阪市西区立売堀4丁目11-14 ・お問い合わせ 06-4391-1781 引用:https://www.inaba.co.jp/ |
| iCOM技研株式会社
|
【特徴】 ピッキングロボットハンドを販売する企業。箱型や紙などさまざまな形状の製品を把持できる製品を持つ。 【会社概要】 ・所在地 兵庫県小野市敷地町811番地1 ・お問い合わせ 0794-70-8407 引用:https://www.icom-giken.com/ |
| 株式会社ニューエラー
|
【特徴】 大手ロボットメーカーに対応した電動空気圧ハンドを複数種類開発するメーカー。 【会社概要】 ・所在地 〒544-0006 大阪市生野区中川東1丁目7番21号 ・お問い合わせ 06-6754-8585 引用:https://www.newera.co.jp/ |
| 安藤株式会社
|
【特徴】やわらかなグリッパを持つエンドエフェクタを販売している企業。主要ロボットメーカーにも対応しており、導入が容易なケースもある。 【会社概要】 ・所在地 〒466-8515 愛知県名古屋市昭和区白金1-16-7 ・お問い合わせ 052-882-7772 引用:https://www.ando-jp.com/ |
| ピアブ・ジャパン株式会社
|
【特徴】 真空システムを利用した江戸エフェクタやコンベアを提供するメーカー。ISO 9409-1規格に準拠したサイズの製品も提供可能で、小型産業用ロボットとの連携もできる。 【会社概要】 ・所在地 〒124-0012 東京都葛飾区立石8-43-17 ・お問い合わせ 03-6662-8118 Contact us | Piab.com引用:https://www.piab.com/ja-jp/ |
| シナノケンシ株式会社
|
【特徴】 電動エンドエフェクタ開発の最先端メーカー。人の手のような柔軟な動きで柔らかいものから硬いものまで1回で掴める製品を持つ。 【会社概要】 ・所在地 〒386-0498 長野県上田市上丸子1078 ・お問い合わせ 0268-41-1800 引用:https://jp.aspina-group.com/ja/ |
| 古川機工株式会社
|
【特徴】 ゲル状の対象物のハンドリング技術を持つロボットハンドメーカー。ケチャップやマヨネーズなどの形を崩さずに、ほかの場所へ移動可能。食品製造や再生医療開発現場などで導入実績あり。 【会社概要】 ・所在地 新潟県長岡市滝谷町1917-7 ・お問い合わせ 0258-22-3501 引用:https://www.furukawakikou.co.jp/ |
| 株式会社スター精機
|
【特徴】 ハンド用パーツ専門ショップを持つメーカー。ロボットハンドパーツを1,400種類以上取り揃えており、必要な部品が網羅している。エンドエフェクタの製作実績も豊富。 【会社概要】 ・所在地 〒480-0132 愛知県丹羽郡大口町秋田3-133 ・お問い合わせ 0587-95-7551 引用:https://www.stertec.co.jp/~star |
| Robotiq
|
【特徴】 多種多様なエンドエフェクタを開発するメーカー。簡単に設定や操作ができる製品を持つ。 【会社概要】 ・所在地 本社はケベック州のレヴィ。営業支部は米国、南米、ヨーロッパ、アジアに分散。 ・お問い合わせ お問い合わせ|Robotiq引用:https://robotiq.com/ja |
| ダブル技研株式会社
|
【特徴】 汎用的な多指・多関節型ロボットハンドを取り扱うメーカー。軽量かつコンパクトな設計が特徴。 【会社概要】 ・所在地 神奈川県藤沢市長後903‐3 ・お問い合わせ 046-206-5611 引用:https://j-d.co.jp/ |
| 株式会社コスメック
|
【特徴】 アメリカやヨーロッパにも営業拠点を持つグローバルメーカー。精密機器や油圧機器の設計から製造のノウハウから、高い把持力をもつエンドエフェクタを開発。 【会社概要】 ・所在地 〒651-2241 神戸市西区室谷2丁目1番5号 ・お問い合わせ 078-991-5117 引用:http://www.kosmek.co.jp/ |
| 株式会社Thinker
|
【特徴】 エンドエフェクタと合わせて使用するセンサーの開発メーカー。独自のセンシング技術で、鏡面や透明な対象物の検知が可能となる。 【会社概要】 ・所在地 〒541-0056 大阪市中央区久太郎町4丁目1-3 大阪センタービル6F-188 ・お問い合わせ 株式会社Thinker (thinker-robotics.co.jp)引用:https://www.thinker-robotics.co.jp/ |
| 興和オプトロニクス株式会社
|
【特徴】 省力化ロボットラインの設計・製作を得意とするメーカー。ネジ締めや部品組み立てを行うロボットユニットを提供。 【会社概要】 ・所在地 〒460-0003 愛知県名古屋市中区錦3丁目6番29号 サウスハウス10階 ・お問い合わせ 052-963-3937 引用:https://robotics.kowa-opt.co.jp/ |
| CKD株式会社
|
【特徴】 把持ハンド・吸着ハンドを取り揃えているメーカー。対象物に対する衝撃を低減するスプリング搭載の製品をもつ。 【会社概要】 ・所在地 〒485-8551 愛知県小牧市応時二丁目250番地 ・お問い合わせ 0568-77-1111 引用:https://www.ckd.co.jp/ |
| 株式会社MUJIN
|
【特徴】 物流や製造現場の作業を自動化する、独自技術を搭載したエンドエフェクタを提供するメーカー。ロボットに自律的に考えさせて作業を行うことができる。 【会社概要】 ・所在地 〒135-0053 東京都江東区辰巳3-8-5 ・お問い合わせ 03-4577-7637 引用:https://www.mujin.co.jp/ |
| 株式会社北川鉄工所
|
【特徴】 2爪や3爪平行・省段取りグリッパのエンドエフェクタを販売するメーカー。工作機器のチャック製造ノウハウから、対象物の把持部寸法が測定できるエンドエフェクタも開発。 【会社概要】 ・所在地 〒726-0003 広島県府中市元町77−1 ・お問い合わせ 082-263-5552 引用:https://www.kiw.co.jp/index.html |
| オムロン株式会社
|
【特徴】 多様な電子機器を扱うメーカー。精密加工などに役立つエンドエフェクタも多数保有している。 【会社概要】 ・所在地 〒600-8530 京都市下京区塩小路通堀川東入 ・お問い合わせ お問い合わせ | オムロン (omron.com)引用:https://www.omron.com/jp/ja/ |
| ニッタ株式会社
|
【特徴】 食品製造向けのエンドエフェクタを販売するメーカー。からあげなどの不定形なものやパン・トマトなどのつぶれやすいものでも掴める製品を持つ。 【会社概要】 ・所在地 〒556-0022 大阪市浪速区桜川4-4-26 ・お問い合わせ お問い合わせ | ニッタ株式会社 (nitta.co.jp)引用:https://www.nitta.co.jp/ |
| アスカ株式会社
|
【特徴】 海外製品のエンドエフェクタを取り扱う商社機能と、直交ロボットの独自開発を行うメーカー機能をあわせもつ企業。 【会社概要】 ・所在地 〒448-0045 愛知県刈谷市新富町2丁目41番地2 ・お問い合わせ 0566-62-8811 引用:https://www.aska.co.jp/ |
| シュマルツ株式会社
|
【特徴】 真空技術を活かした吸着ハンドの主に扱うメーカー。複数の対象物に合わせて柔軟に組み立てられるエンドエフェクタを開発。 【会社概要】 ・所在地 〒224-0027 神奈川県横浜市都筑区大棚町 3001-7 ・お問い合わせ 045-565-5150 引用:https://www.schmalz.co.jp/ja-jp/ |
| THK株式会社
|
【特徴】 ピッキングを行うエンドエフェクタの開発や搬送の自動化を得意とするメーカー。物流業界の課題解決に注力。 【会社概要】 ・所在地 〒108-8506 東京都港区芝浦2-12-10 ・お問い合わせ 03-5730-3911 引用:https://www.thk.com/opm/logistics |
| SMC株式会社
|
【特徴】 空圧機器分野で国内トップシェアのメーカー。小型で高い把持力を発揮する製品を持つ。 【会社概要】 ・所在地 〒101-0021 東京都千代田区外神田4-14-1 秋葉原UDX 15 階 ・お問い合わせ 03-5207-8271 https://www.smcworld.com引用:https://www.smcworld.com/ja-jp/ |
| 株式会社荻野製作所
|
【特徴】 省力化機械と職場改善のノウハウを活かして、顧客のニーズに合わせたロボットハンドの設計、製作を行うメーカー。 【会社概要】 ・所在地 群馬県高崎市並榎町164番地 ・お問い合わせ お問い合わせ – 株式会社 荻野製作所 (ogisei.com)引用:https://ogisei.com/ |
| 鍋屋バイテック会社
|
【特徴】 鋳物を作る伝統技術をもとに海外でも事業展開している企業。非常に高い把持力の製品まで保有。 【会社概要】 ・所在地 〒501-3939 岐阜県関市桃紅大地1 ・お問い合わせ 0575-23-1162 引用:https://www.nbk1560.com/ |























6.エンドエフェクタに関するご相談は株式会社FAプロダクツへ
FAプロダクツは年間200台もの実績がある関東最大級のロボットシステムインテグレーターです。一貫生産体制をとっており、設計から製造までをワンストップで対応。費用・時間にムダなく最適化を行うことができます。
エンドエフェクタについても、ぜひご相談ください。

お打ち合わせから原則1週間以内に「お見積りとポンチ絵」をご送付いたします。
【ポンチ絵とお見積りのサンプル】
テキストやお電話だけでは伝わりづらいゴールイメージを共有し、スピード感を持った対応を心がけています。
また、同社の「画処ラボ」では、画像処理を用いた外観検査装置の導入に特化し、ご相談を受け付けています。従来は目視での官能検査に頼らざるを得なかった工程の自動化をご検討の際などにご活用ください。
業界最大級の画像処理検証施設を開設!
「画処ラボ」ではルールベースやAIの画像処理を専門エンジニアが検証。ご相談から装置制作まで一貫対応します。
| 所在地・連絡先等 | 営業品目 | 実績 |
| 茨城県土浦市卸町2丁目13-3 TEL.050-1743-0310(代表) FAX.050-3156-2692(代表) https://jss1.jp/ |
・産業用ロボット ・生産設備合理化・省力化の設計及び製作 ・基板電気チェッカーや貼合・折曲など ・治具の設計・製作 |
NM社(電子部品の製造販売)、HS製作所(情報通信・社会産業・電子装置・建設機械・高機能材料・生活の各システム製造販売)、TT社(ショッピングセンターなどリテール事業)、SM社(自動制御機器の製造・販売)、OR社(自動車安全システムの製造販売) |
関東最大級のロボットシステムインテグレーター 生産設備の設計から製造ならお任せください
050-1743-0310 営業時間:平日9:00-18:00

