【図解】画像処理による位置検出とは?仕組みとメーカー5選
目次
1.はじめに
製造工程で製品を加工するとき、搬入・搬出するとき、製造品を固定するとき……このようなときに重要となるのは、製品の位置の正確な確認です。
特に、ロボットが製造を担うにあたっては、位置の測定が重要となります。半導体のようなミクロンレベルのように精密な加工・組立では、なおさら精密な測定が必須となります。
製造品の位置の計測と設定は、人であれば、目で見て、計測器で測って、手で設置位置を調整すれば、正常に製造が行われます。
それに対し、機械が位置を計測し、所定の位置に製造品を設置するためには、誰かが機械にその位置を教えてあげなければなりません。
これをティーチングと呼び、その際に画像処理装置が重要となってきます。
このコラムでは、どのように画像処理を使って機械に伝えるかを紹介します。
もし、検査・検品工程に画像処理システムを導入して、
- 省力化、省人化してコストダウンしたい
- 検査レベルを高めて品質価値を高めたい
というご希望がございましたら、お気軽に画処ラボまでお問い合わせください。
ルール型画像処理からAIによる画像処理まで、ご希望に対して幅広い対応が可能です。
業界最大級の画像処理検証施設を開設!
「画処ラボ」ではルールベースやAIの画像処理を専門エンジニアが検証。ご相談から装置制作まで一貫対応します。
2.位置検出とは?
画像を用いて位置を検出する方式は、
- ボトルの液体高さの検出
- ディスプレイガラスの張り合わせ
- 半導体基板にチップを挿入する位置検出
など、多くの製造業で検査や製造過程で使われています。
このコラムでは、位置検出方式の中の、位置決めについてご紹介します。

>>【公式】ご存知ですか?FAプロダクツは中古FA機器を積極的に買取しております!詳しくはコチラ
(1)治具による位置決め
機械加工で重要なことの一つは、製造品を特定箇所に固定する、位置決めでしょう。
図1では、ワークをガイド治具によって位置決めする様子を紹介します。
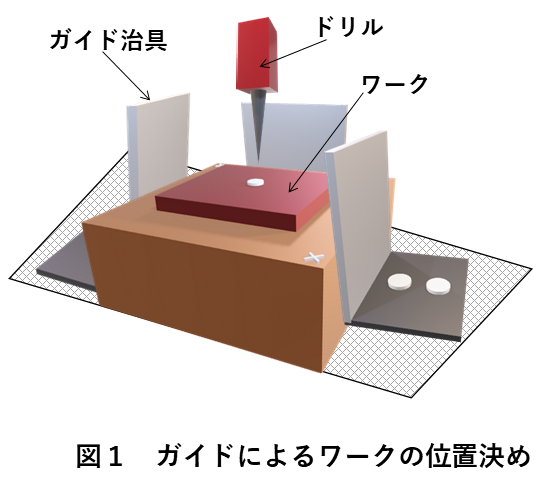
図1は、ワークの中央にドリルで穴を開けるイメージ図です。ワークは、ガイドによって決められた位置に固定されています。
この加工方法は、ワークを加工が終了するごとに、入れ替え作業が必要になり、効率が悪いことが欠点です。
(2)手動による位置決め
図2で紹介する加工方式では、ワークをXYθステージ上に設置し、ワークに貼付されたマークが、カメラによって定位置に来るように、人が表示を見ながらステージの調整を行います。
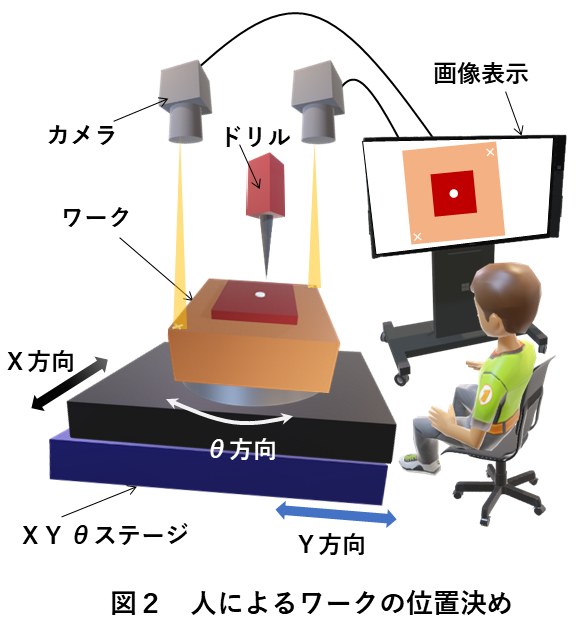
マークが設定どおりに位置付けられたのち、ドリルが作動し加工が始まります。
この位置決めの方式では、人がワークごとに調整することが必要です。
さらに、ワークの形状が変わったときは、カメラの位置や表示方法を変えるなどがあるため、段取り替えへの適応性が低い言えます。
また、コンベアで流れるワークを対処するにも、短時間でできないという欠点もあります。
3.画像処理による位置決め
(1)画像処理による位置決め
図3は、画像処理によるワークの位置決めを紹介した図です。
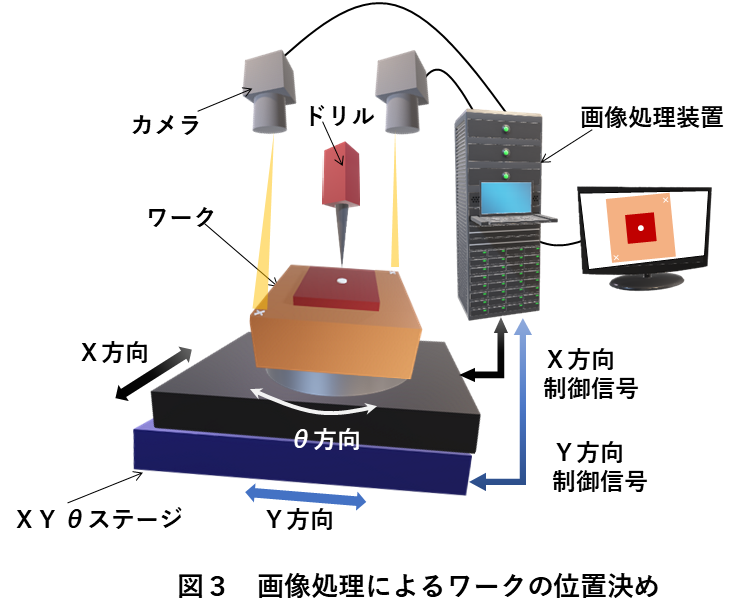
この図3と図2との違いは、人の部分が画像処理装置に変わった点です。
画像処理装置は、マークの位置が設定した通りにあるか確認し、もし異なる位置であれば、ワークを設定位置へ来るように、XYθステージを調整します。
図2の方式について、いくつかの適応性や欠点を紹介しましたが、図3の方式では、それらは改善されていると言えるでしょう。
ところで、画像処理装置は、カメラのワークの映像から、XYθステージを調整するのは、どうするのでしょうか?
(2)画像処理位置決めの移動方法
図4では、画像処理装置が、カメラのワークの映像からXYθステージを調整する方法を紹介します。
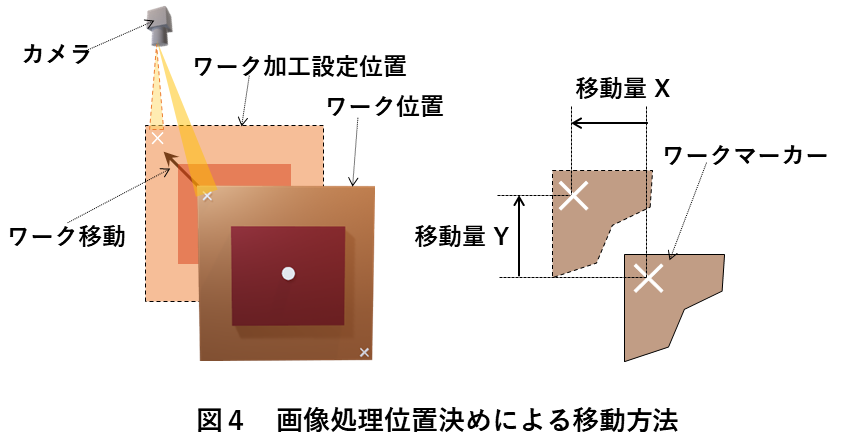
ワークがXYθステージ上に配置されると、図4の左側図のように、加工するための設定位置からズレていることが容易に想像できます。
どれだけズレたかを調べる方法が、ワークに貼付されたマークをカメラで捉える方法です。
カメラで捉えたマークから、本来あるべきマークの位置のズレを、図4の右側図のように、X,Y座標の移動量として捉え、その移動量分だけXYθステージを動かします。
なお、ここではワークに貼付されたマークとしましたが、マークを貼付せずとも、ワークの特徴点をマークとする方法もあります。
(3)パターンサーチとは?
図5は、画像処理装置が、ワーク上のマークを捉えるパターンサーチ画像処理を紹介した図です。
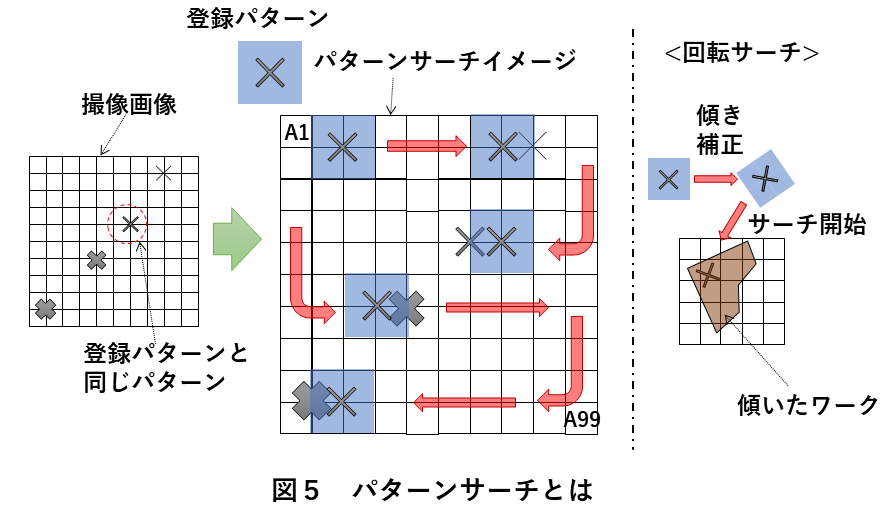
図5では、カメラで捉えた画像には、マーク1つと他に類似形状3つがあると仮定します。
パターンサーチは、マーク画像を登録し、図のA1からA99ピクセルまで、1ピクセルづつ画像を検査して同じ画像を見つけていきます。
図では、上から2番目の画像がマークであるため、ここで登録画像と合致する画像が得られます。
登録画像と同じかどうかを検証する画像処理方法は、次の項目で紹介する相関値による比較です。
なお、ステージ上に設置されたワークは、傾いて設置される場合があります。それを図5の左側に示します。傾きを検知すると、傾きの角度を求め、補正を加えてからパターンサーチを行います。
(4)相関値とは?
図6で、相関値についてご紹介します。相関とは類似性とも言えます。
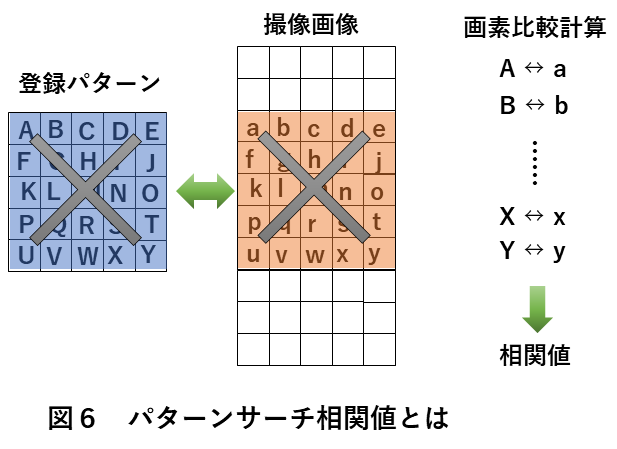
パターンサーチ画像処理では、登録パターンと撮像画像を初めから1ピクセルづつ検査していきます。
図の登録パターンのAからYまでの25ピクセルづつ、順番に移動させて行きます。
撮像画像のaからyまでの25ピクセルと重なったときの相関値は、Aとa、Bとb、…、Yとyと対応するピクセル間の演算を行い、その総和から相関値を求めます。
例えば、演算を対応するピクセルの値の差の演算とすると、全く同じ画像であれば、その総和は0となり同じ画像と判断できます。
演算方法は、いろいろな方法が提案され、画像処理メーカーごとに特色ある相関を求めています。
相関値が設定を超えたときに、最も類似性があると判断し、マークが見つけられます。
>>工場に不要なFA機器はございませんか??FAプロダクツが出張買取いたします!!
4.画像処理によって位置を検出する例
画像処理によって位置を検出する例は、いろいろな業界で応用され、外観検査、ブロブ検査、面積や寸法検査などで使用されています。また、画像処理の方法も、ユーザーにとって使いやすい方式が開発されています。
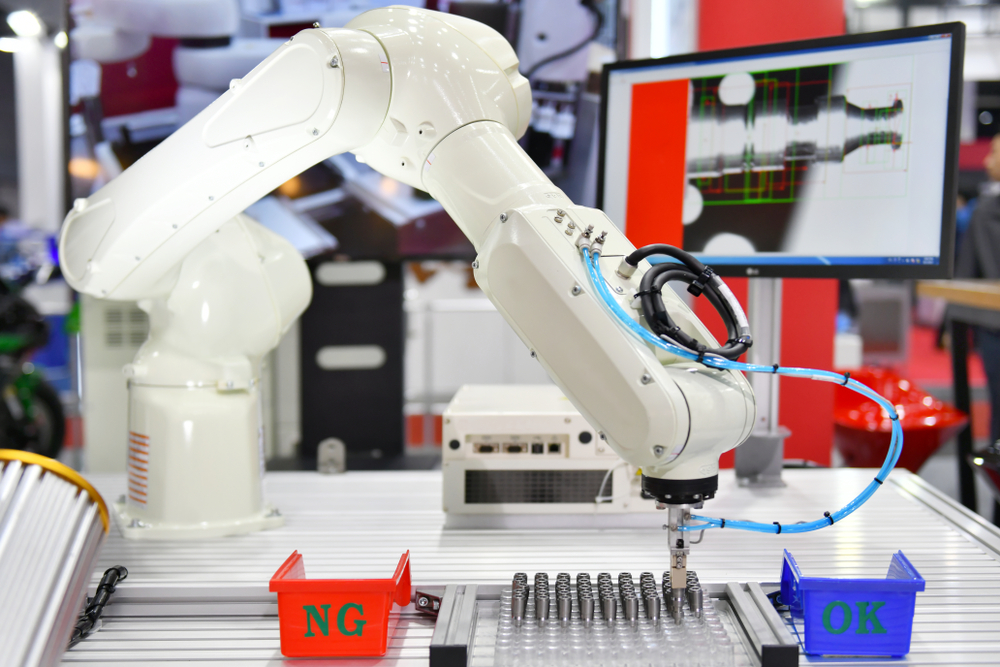
図7は、画像処理によって位置を検出する例として紹介するピックアップロボットです。
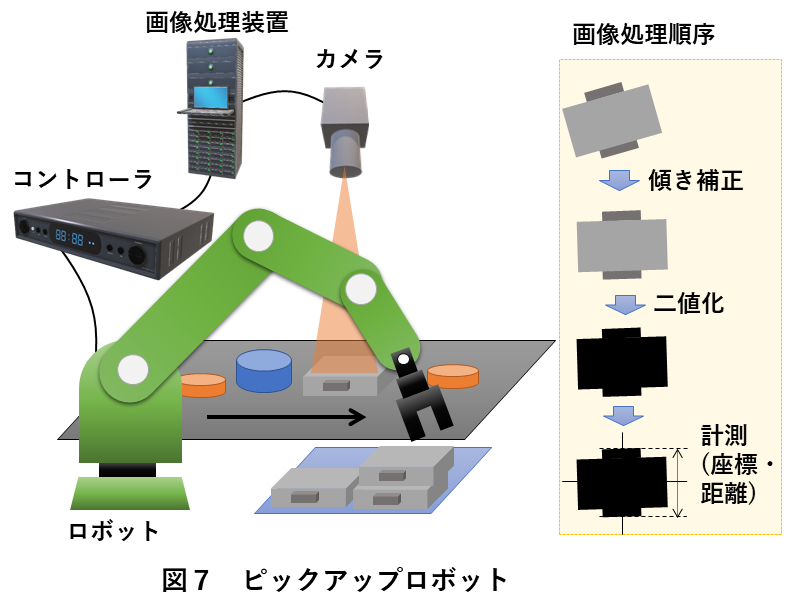
図では、ベルトコンベア上を流れてくる数種類のワークから、特定のワークを選び出し、ロボットがそれをピックアップして指定場所に保管するイメージを描いています。
処理順序は、次のように行われます。
- 選び出すワークの画像を登録
- ワークの状態はカメラで撮像
- 画像処理
・画像入力
・パターンサーチで登録ワークを検出
・ワークの傾き補正
・二値化処理
・ワークの位置を計測 - ロボットコントローラ処理
・画像処理の結果入力
・ロボットアームがピックアップできる位置を計算
・ロボットの制御量を出力 - ロボットがワークをつかめるようにサーボモータを調整
以上のような、ロボットと画像処理を組み合わせた技術は、ロボットビジョンとして、いろいろな技術が開発・運用されています。
5.画像処理位置検出メーカー紹介
この章では、会社が有する画像処理による位置検出方式の製品や技術を紹介します。Webページを合わせて紹介していますので、詳細はそのページで確認してください。
①画処ラボ(ガショラボ)
【所在地】
〒105-0004 東京都港区新橋5丁目35−10 新橋アネックス 2階
TEL:050-3733-3774
WEB問合せ:https://gasho-labo.jp/#contact
https://gasho-labo.jp/
【特徴】
検査の自動化に伴って画像処理装置の導入する際には、複数のセンサーメーカーと複数の画像処理機器メーカーを選択し、それぞれ検査対象によって個別対応する必要があります。
画処ラボは、メーカー横断での機器選定から判断プログラムの選定及び装置の設置構想までを⼀括で提案し、設置からサポートまで⼀元管理。
さまざまなメーカーから、照明は50種類、カメラ・レンズは30種類をとりそろえており、機器や画像処理プログラムの選定だけでなく、装置の構想・設置、サポートまで、ワンストップで相談が可能です。
業界最大級の画像処理検証施設を開設!
「画処ラボ」ではルールベースやAIの画像処理を専門エンジニアが検証。ご相談から装置制作まで一貫対応します。
②株式会社ファースト
【所在地】
神奈川県大和市下鶴間 2791-5
TEL:046-272-8680(本社代表)
【位置検出内容例】
https://www.fast-corp.co.jp/products/aligner/fv-aligner.html
図は、同社の位置決め装置「FV-aligner」です。
FV-alignerは、高機能で高精度な位置決め用の画像処理装置で、ワークを基準位置に合わるために、XYθステージの補正量の計算とステージ軸制御を行います。
パネル状ワークの位置決めに最適なこと、3軸・4軸のステージを利用して位置決めが自動で簡単に構築できること、仕様変更でのカメラ位置変更や軸構成変更に容易に変更できることが、本機器の特徴となります。

③オプテックス・エフエー株式会社
【所在地】
京都市下京区中堂寺粟田町91 京都リサーチパーク9号館
TEL:075-325-2920
【位置検出内容例】
https://www.optex-fa.jp/tech_guide/robot_solution/
http://www.jfas.co.jp/new_release/robot/
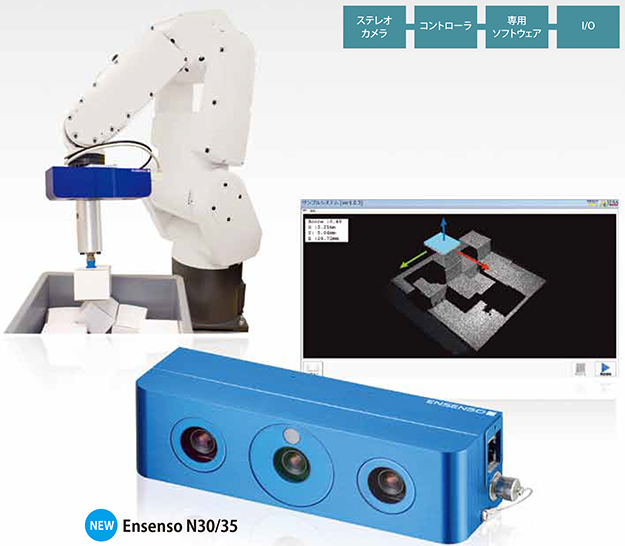
図は、軽量でコンパクトな3Dビジョンシステム「3D-Eye30」です。
これは、ステレオカメラであることから、1台のカメラで高さの計測が可能です。そのため、ワークの高さと位置の量情報を同時に得ることができ、バラ積みワークのピッキングがスムースに行えます。さらに、カスタマイズできる専用アプリケーションソフトによって、ユーザー側でも容易に設定・調整変更が可能です。
④オムロン株式会社
【所在地】
京都市下京区塩小路通堀川東入オムロン京都センタービル
TEL:075-344-7000
【位置検出内容例】https://www.fa.omron.co.jp/product/applications/sensors/vision-sensors_machine-vision-systems/
https://www.fa.omron.co.jp/product/applications/case/ap00003.html
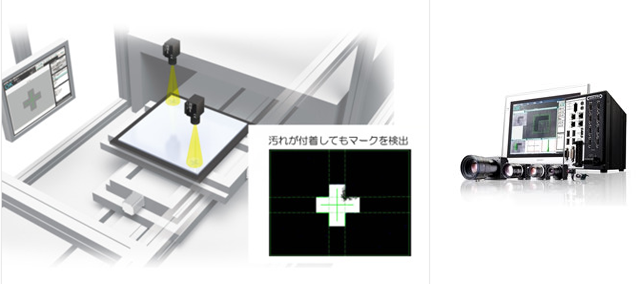
図は、汚れや欠けによるアライメントマーク検出不可、2台のカメラの計測でステージ移動量の計算の多大な調整工数などの問題を解決した事例です。
画像処理システムFHシリーズを導入したことで、撮影環境やロット・ワーク材質による見え方が変わっても、高精度に安定した位置決めができるようになりました。
この画像処理装置の特徴は、短軸+θ軸のステージに対応する「ステージアライメント機能」です。
⑤三菱電機株式会社 産業・FA部門
【所在地】
東京都千代田区丸の内2-7-3 東京ビル
TEL:03-3218-2111(代表)
【位置検出内容例】https://www.mitsubishielectric.co.jp/fa/products/drv/servo/pmerit/lup/case/j4/vol03_alignment.html
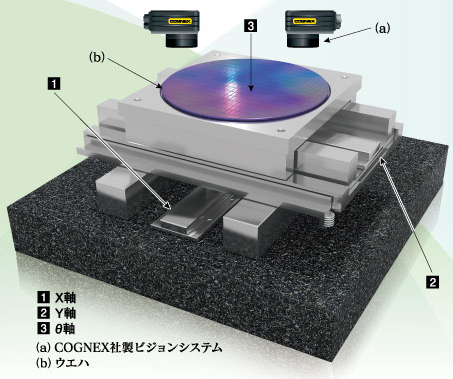
図は、三菱電機社のアライメント装置です。
ウェハを正確に位置決めし、回転軸を高精度に位置決めし、タクトタイムを短くする目的で作られました。
この装置の特徴は、次の3点です。
- COGNEX社製のビジョンシステムを使ってウェハの現在位置を検出が速い
- ダイレクトドライブモータによって、駆動部と直結して高精度・高速な位置決めができる
- 位置決め中に、目標の位置が変更になっても、途中からでも変更に素早く応じることができる
6.画像処理システム導入のご相談は画処ラボへ
ボトルの液体高さを検査する、液晶画面のガラスを張り合わせる、半導体基板にチップを挿入するなどの作業では、人がその場所を確認して作業を行っていました。
それらの作業の精度を上げるには、作業効率を上げるには、どうするかを探っていたところに現れた技術が、画像処理です。
画像処理を行うためには相当の投資が必要になりますが、画像処理のアルゴリズムの開発によって、高価なカメラを使わなくても自動での検査ができる場合もあります。
しかし、どのような画像処理のシステムを導入しようとも、基礎となることは導入前に行っていた検査方法や製造方法のノウハウでしょう。
そのノウハウを画像処理にどう活かすかが、画像処理の成功のカギになります。
画像処理メーカーや開発者は、さまざまな業種と製造プロセスでの経験が豊富です。
その豊富な経験と実績から、位置検出のような画像処理の方式には、独自のものがあります。
一方、自社の製造ラインも独自のものになっていて、通常の画像処理では位置検出が難しいと思うケースがあるでしょう。
しかし、多くの画像処理メーカーや開発者には、自社に当てはまる画像処理方式を持っているところや開発力のあるところが必ずあるはずです。
雑談から、これはという方式が見つかるかもしれません。
画像処理システムの導入をご検討の際は、まずは画処ラボまでお気軽にお問合せください。
業界最大級の画像処理検証施設を開設!
「画処ラボ」ではルールベースやAIの画像処理を専門エンジニアが検証。ご相談から装置制作まで一貫対応します。
関東最大級のロボットシステムインテグレーター 画像処理の検証から装置化ならお任せください
050-1743-0310 営業時間:平日9:00-18:00

