

力覚センサとは?種類や用途、ロボットへの導入例と主要メーカ5選
精密工学会によると、力覚とは「人の五感情報(視覚・聴覚・触覚・味覚・嗅覚)のうち触覚情報に関係する感覚で、物体と接触した際に人間が感じる力の感覚」です。人が物を持っていた時に、その物が何かの物体と接触したときに、接触した物から伝わる反力を感じます。ロボットの場合は、アームに持った物が他の物によってアームの移動を阻止された場合に、物体の存在を検知します。
しかし、検知したときには、物体は破損等が想定され、そのような状態ではロボットが人に変わって作業を行うことは難しくなります。そこで、ロボットにも人の力の触覚を持たせれば、人と同じ作業ができることになり、力覚センサが開発されました。
この記事では力覚センサの原理や種類・用途、ロボットへの導入例を解説し、主要メーカをご紹介しています。力覚センサについて知りたいと考えている方はぜひ参考にしてください。
目次
1.力覚センサとは

例えば、ロボットが軸を軸孔に挿入するためには、軸にかかる力を検出して、修正する機能が必要です。その、「検出」や「修正」する機能が力覚センサです。
ここでは力覚センサ関して基本的な物理的な測定原理と、力覚センサの原理について紹介します。
(1) 力を測定するセンサ
力覚センサにはいろいろな種類があります。基本的な原理は同じですので、ここではひずみゲージを例に力覚センサを解説します。
下記は「ひずみ力覚センサ」のセンサである「ひずみゲージ」についての図解です。(図3)
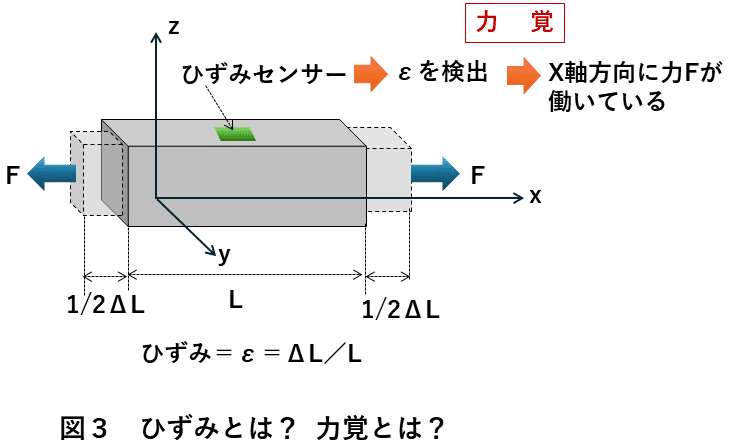
直方体のx軸方向に力Fが加わったときに、直方体はx軸方向に膨らみます。直方体にひずみゲージを貼り付けておくことで、直方体に力Fが加わったときの、ひずみの大きさを測定できます。
なお、力覚センサを正常に使うための基本条件として、力Fは、材料の弾性域内での変形をもたらす力で、Fがもとの0になれば、直方体の形は元通りになることに注意しましょう。
ひずみεは、直方体の元の長さをLとし、力Fが加わることで、ΔL伸びたとすると、「ε=ΔL/L」
で表されます。
すなわち、ひずみゲージはx軸方向の力Fによって、ひずみεが生じたことを測定します。
(2) 力覚センサの原理
ひずみゲージを例として話を進めます。
図4の左側は、円柱体のx軸、y軸、z軸方向に働く、力の関係を表しています。

図4の円柱体に力が働くと、x軸、y軸、z軸方向にそれぞれ、Fx、Fy、Fzの力が働き、さらにそれぞれの軸の周りにモーメントMx、My、Mzが働きます。
そして図4の真中の図は、円柱体に働く力を測定するひずみゲージが張りつけられたものです。この、ひずみゲージが貼りつけられた円柱体が力覚センサです。
※ひずみゲージの貼り付け位置に決められた法則はなく、円柱体の形状をもとに、3方向の力とモーメントを測定できる位置を検討して貼り付けられます。メーカーの研究によって、最善の位置が決められます。
図4の右側の図は、力覚センサに力が加えられ、円柱体が歪んだイメージ図です。この歪んだ状態から、ひずみゲージがひずみ量を測定してひずみ量を出し、ひずみ量からどれだけの力がどの方向が働いたかを、力覚センサは検知します。
力覚センサに力が加えられてひずみが生じても、力が取り除かれればひずみはなくなり元の状態に戻る「弾性域内での変形」であることが、力覚センサの絶対条件です。
【参考】
力覚センサがひずみゲージ量から、どの方向にどれだけの力が加わったかを計算する方法(図5)

力覚センサは、6軸センサとして、6個のひずみゲージで、x,y,z方向の力とモーメントを測定します。これを、マトリックスの式で表すと、図5の最初の計算式のようになります。
S1~S6はひずみゲージの測定値で、C11~C66の係数をもとに、実測されたx,y,z方向の力とモーメントの量で計算されます。計算式は、図5の2番目の36式の方程式で表されます。方程式を解けば、C11~C66の係数が分かり、係数マトリックスができあがります。
C11~C66の係数の係数マトリックスを求めるには、実験でx,y,z方向の力とモーメント力を与えてひずみゲージの測定量を計り、計算によって求めます。
実験の方法やデータの測定法などは、力覚センサの形状や使用方法などをによって異なります。
C11~C66の係数の係数マトリックスの逆行列(行列式に-1を付けた行列)に、ひずみゲージのマトリックスと演算すれば、図5の最後の式のように、ひずみゲージの値から、x,y,z方向の力とモーメントの量を求めることができます。
(3) 力覚センサを使ったロボットの作業手順例
図6では、ロボットに力覚センサを装着した場合の、ロボット作業について紹介しています。
(図の赤線は力覚センサに働く力やモーメント、青線は軸の重力を表す)
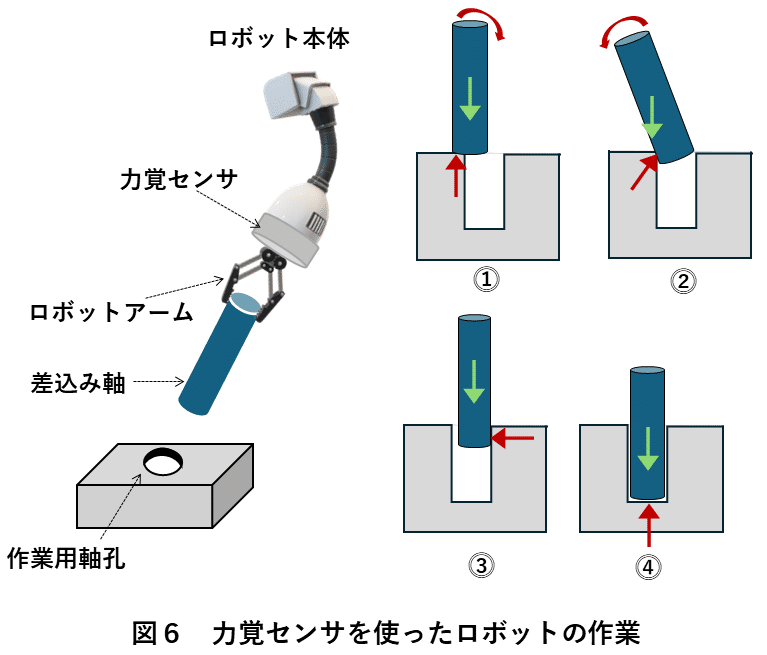
ロボットの想定としては、図6の左側の図のように、ロボットアームが軸棒をつかんで、ワークの軸孔に装着する様子をイメージしています。
軸棒が軸孔に挿入されたときの、軸孔と軸棒のクリアランスは、非常に小さなものと仮定します。
以下では力覚センサとロボットがどのように働くのか、図6右側の①~④を解説します。
➀ 図6 ➀の動作
ロボットアームが軸棒を垂直に軸孔に入れようとしたところ、端の部分がワーク台座に引っ掛かった状況です。力覚センサは垂直方向の力と、軸棒のモーメント力を検知します。
ロボットコントローラは、検出した軸棒のずれを修正して、ロボットに修正動作を支持します。
② 図6 ②の動作
ロボットアームが軸棒をやや斜めに入れようとしたため、力覚センサは複数方向の力とモーメント力を検知して、傾き具合を計算して修正動作をロボットに指示します。
③ 図6 ③の動作
ロボットアームは軸棒を軸孔に正確に挿入しましたが、軸孔の中心と軸棒の中心がややずれたため、軸棒が軸孔の壁に当たり、力覚センサが壁との接触力を検知して、一旦挿入中止の指示を出します。
力覚センサが接触力を検知しない程度に軸棒の挿入位置を調整し、コントローラはロボットアームに修正指示を出して挿入位置を修正します。
⓸ 図6 ⓸の動作
ロボットアームは軸棒を軸孔の底まで挿入しますが、そこに達したところで、力覚センサが底に対して力が加わっていない(軸棒の重力と釣り合う)ことを検知し、ロボットアームは軸棒を離して引き上げます。
【参考動画】以下では、力覚センサに関する動画を紹介します。
➀ ロボットに力の感覚をもたせる ― 歪ゲージ式6軸力覚センサ ZYXer(ジクサー)【新東工業株式会社】
③【研磨作業ー力覚センサ搭載の有効性ー】バリ取り、研削、嵌め合い作業などにも。
また、ロボットの制御については、次のコラムを参考にして下さい。

ロボットのハンドリングについては、次のコラムを参考にして下さい。

2.力覚センサの必要性
ここでは、人とロボットの作業を比較して、力覚センサの必要性を説明します。
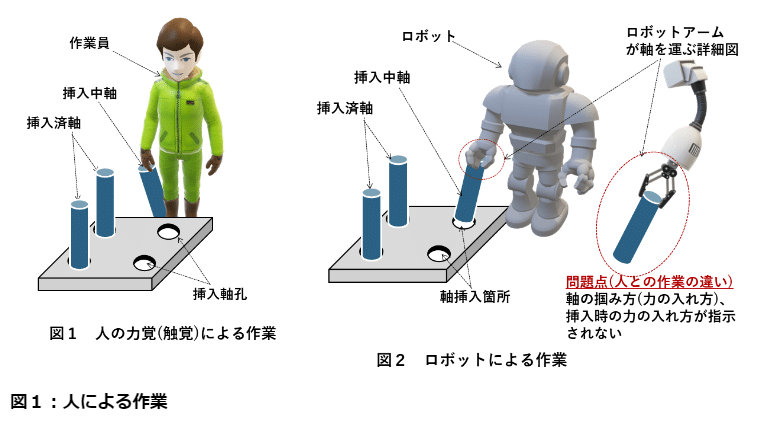
上の図1と図2は、軸孔に軸を挿入する作業の図です。それぞれについて見てみましょう
【図1:人による作業】
人は軸の挿入に際して、軸孔の周辺に軸が当たらないように、かつ、軸孔に垂直に軸が挿入できるようにします。もし軸がどこかに当たれば、人の視覚と触覚で分かりますもし当たっても無理に力を入れて軸を挿入して、傷をつけるようなことはしません。
軸が軸孔の底に達したことを触覚で確認し、作業を終了します。
【図2:ロボットによる作業】
軸孔の位置をコントローラで確認し、そのままでよいかどうかを判断した上で軸挿入の指令をロボットに与えます。
するとロボットは指示された位置に軸を挿入します。しかし、軸が軸孔の周辺に当たったとしても、ロボットは挿入し続けます。
その結果、軸や軸孔の壁側を傷つける可能性があります。さらに、軸が曲がっていても、挿入します。その結果、軸が軸孔の底まで入らない可能性があります。
これらのことから、人とロボットの軸の挿入作業の大きな違いは次の点であると言えます。
・ロボットは、支持された軸孔に、軸を挿入する指示通りの作業を行います。
・ロボットは、途中で軸がどこかに当たっても、軸の挿入を続けます。
・人は軸がどこかに当たれば、修正して当たらないようにします。
以上から、ロボットによる作業を確実に行うためには力覚センサが必要であることがわかります。
3.力覚センサの種類と用途
| ひずみゲージ式 | 静電容量式 | 圧電式 | 光学式 | 備考 | |
| 剛性 (壊れ難さ) |
良い | 良い | 非常に良い
(ピエゾ効果の圧電素子を使用) |
悪い
(測定対象に非接触で測定) |
- |
| 耐久性 | 良い
(測定用抵抗の変動回数が多い) |
非常に良い | 非常に良い | 非常に良い | - |
| 耐環境性 | 良い | 良い | 非常に良い | 非常に良い | 高温、高湿度、振動、電磁波などに対する影響 |
| 精度 | 非常に良い | 非常に良い | 良い | 良い | - |
| 応答性 | 非常に良い | 非常に良い | 非常に良い | 良い | - |
| コスト | 高価 | 安価 | 安価 | 高価 | - |
| その他 | 多点化が難しい | 小型化や多点化が容易 | 多点化は難しい | 小型化・多点化は難しい | 多点化とは面で測定値をとらえること |
表1 力覚センサの比較
上の表1は、以下の4種類の力覚センサの比較まとめです。
・ひずみゲージ式力覚センサ
・静電容量式力覚センサ
・静電容量式力覚センサ
・光学式力覚センサ
ここでは力覚センサの種類やその用途について詳しく紹介します。
(1) 力覚センサの種類
力覚センサの種類は多くあります。一般化されたセンサとメーカー独自で開発したセンサがありますが、以下では、一般的に用いられるセンサついて紹介します。
➀ ひずみゲージ式力覚センサ
2章で取り上げたように、圧縮力や引張力に対してひじみゲージがひずみを検知し、物体に加わる力とモーメントの量を検知するひずみゲージ式力覚センサです。
② 静電容量式力覚センサ
電圧を加えて電荷を貯めた静電容量式の2枚の平行板に力を加えると、平行板の距離が変化はし、変化量に応じて静電容量が変わります。
変化した静電容量によって、加えられた力が分かる力覚センサが、静電容量式力覚センサです。
③ 圧電式力覚センサ
力を加えることで電圧が変化する圧電素子を使えば、変化電圧から加わっている力が測定できます。圧電素子には水晶やジルコン酸チタン酸鉛があります。
この方式の力覚センサが、圧電式力覚センサです。
⓸ 光学式力覚センサ
力を測定する箇所にマークを添付し、力を加えることでマークに変形が起きます。
マークの変形を光学センサ(カメラまたはレーザー)で検知し、マークの変形から加わった力を計ることができ、この方式の力覚センサが、光学式力覚センサです。
(2) 力覚センサの用途
力覚センサを用いたロボットの作業では、従来できなかった次のような作業ができるようになっています。
➀ 電子機器や自動車の生産ラインで、部品のピックアップや組立
② 工業生産ラインでの重量計測などの品質検査
③ 部品の研削や研磨作業
⓸ 加工部品のバリ取り作業
⑤ ギアのはめ込み、組立作業
4.力覚センサの主要メーカ5選!
ここでは力覚センサの主要メーカを5社に厳選し、ご紹介します。
| (1) 株式会社ワコーテック
|
【製品の特徴】 静電容量方式の力覚センサDynPickは、シンプル構造・設計によって低価格化を実現しています。 センサ内部にストッパー機構を内蔵し、過負荷によるセンサの破壊を保護します。 環境対応として、防水防塵機能を有します。 |
| (2) ビー・エル・オートテック株式会社
|
【製品の特徴】 6軸力覚センサ/BLフォーストルクセンサは、視覚・触覚の外部環境変化に対応できる感覚制御・知能ロボットに力覚を伝えるため、6軸力覚センサが、X・Y・Z方向の力とトルクをリアルタイムに同時検出する6軸力覚センサです。 ロボットの作業の信頼と品質向上を、6軸力覚センサの力制御機能で実現します。 https://www.bl-autotec.co.jp/products/index.php?cid=5 |
| (3) 株式会社テック技販
|
【製品の特長】 製品の1つ、小型2軸モーメントセンサは、世界最小クラスのサイズで、0.2N・m、0.9N・mの2つの型式をラインナップしています。 低容量のモーメントセンサ、小型軽量、干渉補正係数による高精度が特徴です。https://tecgihan.co.jp/products/category/sensor-amplifier-measuring-device/ |
| (4) セイコーエプソン株式会社
|
【製品の特長】 力覚センサシステムとして、今まで困難だった力覚制御を必要とする精密作業を、力覚センサとロボットの連携すること開発環境を提供します。 6軸ロボット接続、スカラロボット接続などが有り、高剛性・高感度で作業が可能となります。 さらに、力覚センサー制御ソフトウェア「Force Guide 7.0」で、力覚センサーアプリケーションの構築が簡単にできます。 また、シミュレーターの移動方向表示、力波形の表示・記録機能が、デバッグ作業が容易にできること、ダイレクトティーチング機能などが、システムの特徴です。 |
| (5) 新東工業株式会社
|
【製品の特徴】 6軸力覚センサ「ZYXer(ジクサー)」は、再測レベルの0.83msecの通信速度、高精度で1/4000の分解能、検出データの被直線性2.0%の高い信頼性が特徴です。 ジクサーは、x,y,z3軸の荷重と各軸周りのモーメントを同時に検出できるため、ロボットでの作業が、人の手作業と同様になるように精密制御されます。 なお、定格容量500~9000Nまでの11種類があり、いろいろなロボットへの対応が可能です。https://www.sinto.co.jp/product/force-sensor/ |



5.力覚センサに関するご相談は株式会社FAプロダクツへ
FAプロダクツは年間200台もの実績がある関東最大級のロボットシステムインテグレーターです。一貫生産体制をとっており、設計から製造までをワンストップで対応。費用・時間にムダなく最適化を行うことができます。
力覚センサについても、ぜひご相談ください。

お打ち合わせから原則1週間以内に「お見積りとポンチ絵」をご送付いたします。
【ポンチ絵とお見積りのサンプル】
テキストやお電話だけでは伝わりづらいゴールイメージを共有し、スピード感を持った対応を心がけています。
また、同社の「画処ラボ」では、画像処理を用いた外観検査装置の導入に特化し、ご相談を受け付けています。従来は目視での官能検査に頼らざるを得なかった工程の自動化をご検討の際などにご活用ください。
業界最大級の画像処理検証施設を開設!
「画処ラボ」ではルールベースやAIの画像処理を専門エンジニアが検証。ご相談から装置制作まで一貫対応します。
| 所在地・連絡先等 | 営業品目 | 実績 |
| 茨城県土浦市卸町2丁目13-3 TEL.050-1743-0310(代表) FAX.050-3156-2692(代表) https://jss1.jp/ |
・産業用ロボット ・生産設備合理化・省力化の設計及び製作 ・基板電気チェッカーや貼合・折曲など ・治具の設計・製作 |
NM社(電子部品の製造販売)、HS製作所(情報通信・社会産業・電子装置・建設機械・高機能材料・生活の各システム製造販売)、TT社(ショッピングセンターなどリテール事業)、SM社(自動制御機器の製造・販売)、OR社(自動車安全システムの製造販売) |
関東最大級のロボットシステムインテグレーター ロボットシステムの設計から製造ならお任せください
050-1743-0310 営業時間:平日9:00-18:00

