触覚センサーとは?種類とその測定原理、用途|主要メーカ15選!
触覚センサーは近年、製造現場で注目されているロボット等に使用されているセンサーです。
触覚センサーにはさまざまな用途や測定原理があり、触覚センサーの導入にはそれぞれの特徴をよく理解して最適なものを選択する必要があります。
本記事では、触覚センサーの基本的な用途や種類ごとの原理について解説しています。また、触覚センサーの主要メーカー15選も紹介しています。
本記事を読んで、触覚センサーについて理解を深めてください。
もし、電子負荷装置のコンサルティングを受けて、
・省力化、省人化してコストダウンしたい
・生産性アップして売上を上げたい
・人的ミスを減らして品質価値を高めたい
・どのメーカーの自動化設備を使えば効率的かわからない
という場合は、お気軽に株式会社FAプロダクツまでお問い合わせください。
関東最大級のロボットSIerとして、最適化のご提案をさせていただきます。
目次
1.触覚センサーとは
ここでは、触覚センサーについて、また、その使用用途を解説します。
(1)触覚センサーとは
触覚とは、ヒトの五感のうちの1つでモノに触った時に生じたり、痛みや温度を感じる感覚です。
一方で、触覚センサーはものに触った時の感覚を圧力などを測定して電気信号に変換することで数値化して目に見える形にして、触っている状況や強さなどの制御に活用しています。
(2)触覚センサーの使用用途
触覚センサーはいろいろな場面で活用されています。ここでは触覚センサーの代表的な活用方法である、ロボット分野での活用、医療分野での活用、入力装置における活用について解説します。
①触覚センサーのロボット分野への応用
触覚センサーの代表的な活用方法の1つかロボット分野への応用です。
近年では産業分野でのロボットによる自動化、省人化が進められています。触覚センサーを用いないロボットの場合、位置情報を用いて対象物との距離を把握しアームを動作させています。位置情報を用いた方式では、対象物ごとの細かい設定が必要であったり、対象物の位置がズレる等の想定外の事態が起きた場合は対応できません。
ロボットに触覚センサーを使うことで、さまざまな製品を安定して掴むことができたり、臨機応変な対応が可能になります。
また、産業用ロボットだけでなく人型ロボットやロボット掃除機に触覚センサーを内蔵することで、障害物との接触によるアクシデントを防いだり人との触れ合いに活用されています。
【関連記事】


②医療用介護マット
触覚センサーをベッドマットに装着することで、ベッド上の人の状態を把握できます。
ベッド上に複数の触覚センサーを設置することで、ベッドの上に寝ているのか座っているのかなどの状態や、寝返りの頻度などを測定できます。また、ベッドからの転落防止も可能です。
夜間徘徊の危険がある場合にはベッドだけでなく、フロアマットに触覚センサーを装着する場合もあります。
③入力装置
入力装置に使用される触覚センサーは、単純なポインティングデバイスとしてだけでなく、筆圧などの入力の強さまで検出することが可能です。
また、触覚センサーは仮想現実(Virtual Reality:VR)の分野でも取り入れられていて、スーツやグローブに搭載することでよりリアリティのある世界を再現するために使用されています。
触覚センサーについては、以下の動画も参考にしてください。
引用:FingerVision 「視触覚」センサーによる力と滑りの検出 ロボデックス2024
引用:【研究紹介】ロボットがモノをつかむのは大変!触覚センサーの働き
2.触覚センサーの種類と測定原理

一口に触覚センサーといっても、いくつかの種類があり測定原理もさまざまです。ここでは代表的な触覚センサーである力覚センサーとすべり覚センサー、近接覚センサーについて解説し、その測定原理についても見ていきましょう。
(1)力覚センサー
力覚センサーはセンサーに加わった圧力や回転する力の強さを表すトルクの強さや向きを測定するためのセンサーで、ロボットアームでものを掴むときに、どの程度の強さで掴むのかや掴んでいる状態を検知するために用いられています。
ここでは、光学式、圧電式、電気抵抗式、静電容量式の4種類について説明します。
①光学式
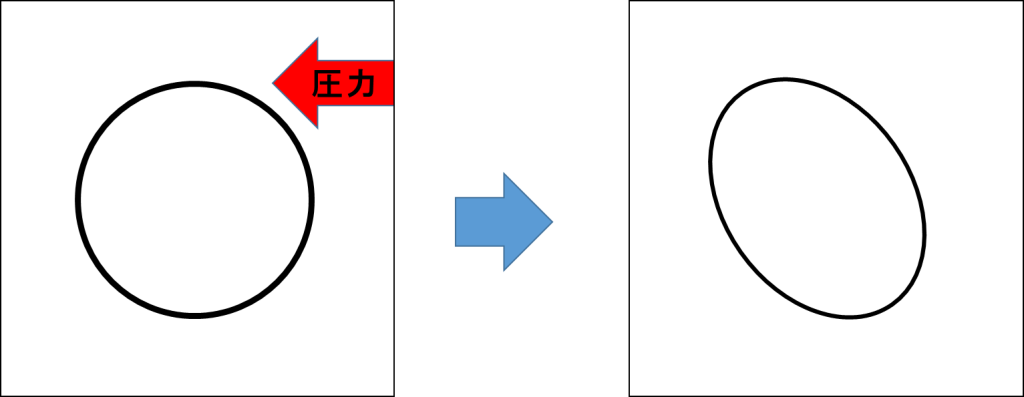
光学式の力覚センサーでは、力のかかる部分に〇や☆などのわかりやすい模様をプリントしておき、力がかかることで変形した模様を測定し、模様の変化量から力の大きさを検出する方式です。事前にどのくらいの力がかかると模様がどのように変化するかを調べておく必要がありますが、電気回路をシンプルな構造にすることができます。
また、発光素子と受光素子、弾性体を用いて力がかかることで受光量が変化することを利用して力を測定する方法もあります。
②圧電式
圧電式の力覚センサーでは、力が加わることで電圧を発生させる圧電素子によって力の大きさを測定します。
圧電素子には、水晶やジルコン酸チタン酸鉛(PZT)などが用いられていて他の方式のセンサーと比べると高い剛性を持っているので変形しにくくかつ、高い感度を実現できるというメリットがあります。
③電気抵抗式
電気抵抗式では、加圧により変形することで電気抵抗が変化するひずみゲージをもちいたロードセルなどで力の大きさを検出します。
ロードセルは測定できる力の方向が決まっていて縦・横・高さ方向の力か、その方向を軸にしたトルクのどちらかを測定できる3軸力覚センサーがありますが、その両方を同時に測定することのできる6軸力覚センサーもあります。6軸力覚センサーは3軸力覚センサーよりも高価になりますが、より多くの作業に対応することができます。
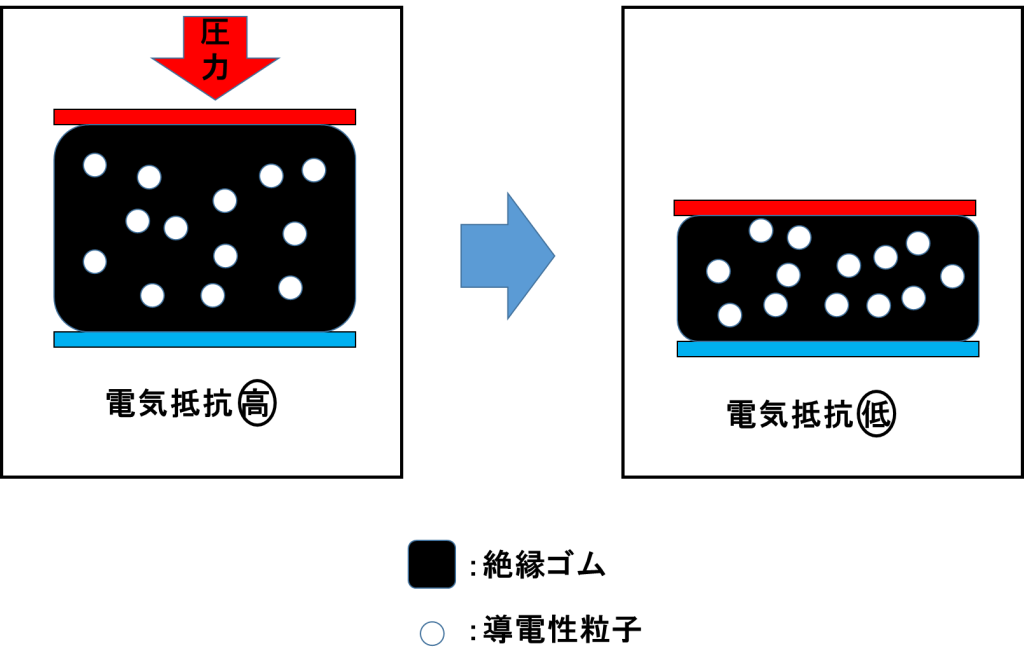
ロードセル以外では、感圧導電ゴムを用いた方式があります。感圧導電ゴムは絶縁体であるゴムのなかに導電性粒子を均一に拡散させた構造をしています。このゴムに力が加わり変形することで導電性粒子間の距離が近くなり電気抵抗が低くなることで力の大きさを検出が可能です。
④静電容量式
静電容量が、極板間の距離によって変わることを利用した方式です。
電荷を蓄えることのできる誘電体に弾性のある素材を使用し、加圧で極板間距離が小さくなり静電容量が大きくなることを利用して力の大きさを検出します。構造がシンプルで小型化しやすいというメリットがありますが、電磁ノイズなどの影響も受けやすいといわれています。
【参考記事】力覚センサ―については、以下の記事でも詳しく解説しています。

(2)すべり覚センサー
すべり覚センサーはものを掴んで持ち上げたときに、センサーと対象物の間のすべりを検知するためのセンサーです。
人間の場合、持っているものがすべり落ちそうになった時には自然に力を入れて落とさないようにできます。すべり覚センサーを取り入れることで掴む力を調整してものを落とさないようにできるので、ロボットアームには特に重要なセンサーです。
ここでは、光学式、変位検出式、振動検出式、負荷変化検出式の4種類について説明します。
①光学式
ものを掴む場所に光センサーを搭載して、対象物の表面状態の変化をすべりとして検出します。光学式マウスが動きを検知するのと同じ原理なので、搭載が簡単で表面の変化を直接検出できるメリットがあります。
②変位検出式
モノをつかむ場所にローラーやボールを搭載して、ローラーやボールの回転量からすべりを検知する方法です。
つかんでいるモノの滑りを物理的に直接検知することができるメリットがありますが、ロボットアームの先端部分(モノをつかむ部分)にローラーやボール、回転の検出機構を搭載できるスペースを確保しなければならないデメリットがあります。
③振動検出式
振動検出式は、つかまれている対象物がすべりだす前に発生する特有の微振動を、ロボットアームに取り付けられた加速度センサーを用いて検出する方式です。
振動検出式のすべり覚センサーは、光学式や変位検出式に比べて搭載しやすいというメリットがある一方で、すべりを間接的に検出する方式なので対象物の表面状態に検出精度が影響を受けてしまうデメリットがあります。
④負荷変化検出式
力覚センサーで取得した値をモニタリングして、すべり検出アルゴリズムを用いてソフトウェア上で滑りを検出する方式です。
すべりが発生すると力覚センサーにかかる負荷が急激に減少するなどの変化を、アルゴリズムを用いて検出します。ソフトウェア上で力覚センサーの値を用いる方式なので、すべり覚センサーのために新たにセンサーを追加する必要がないことがメリットといえます。しかし、振動検出式と同様にすべりを直接検出していないので、つかむ対象物の表面状態によってはアルゴリズムが通用しない場合があるというデメリットがあります。
(3)近接覚センサー
近接覚センサーは、対象物に触れる前に使用されるセンサーなので、厳密にいえば「触覚」センサーとはいえません。しかし、近接覚センサーがなければ、対象物の近くでスピードを落としゆっくりつかむといった動作はできないでしょう。そのため、広義での触覚センサーには近接覚センサーも含まれます。
ここでは近接覚センサーの測定原理を3種類紹介します。
①超音波反射式
人間には聞こえない超音波を発して、物体に当たって戻ってくるまでの時間を測定し対象との距離を検出する方式です。
広く使われている方式の1つで、対象物の色や透明度に影響されずに距離を検出できるメリットがあります。一方で、対象物が柔らかい布や泡立った液体だと超音波が吸収されてしまい、距離を正確に測定できない点がデメリットといえるでしょう。
②光反射式
光反射式は超音波反射式と並んで一般的な方式で、対象物に光を照射し、反射光の入射角や強度、帰ってくるまでの時間から対象物からの距離を測定する方式です。
光反射式は応答速度が早く、精度が高いメリットがありますが周囲の光による影響や対象物の色や透明で光を反射しない場合は使用できないというデメリットがあります。
③静電容量式
センサー付近に電界を発生させ、対象物と接近することで静電容量が変化することを利用して距離を測定する方式です。
電界内にものが入ると静電容量が変化するので、その変化量と距離の関係を事前に求めておくことで対象物との距離を測定することができます。
静電容量式の近接覚センサーは、対象物の形状の自由度が大きいことや検出範囲が広いなどのメリットがある一方で、対象物の形状や素材によって静電容量の変化に違いがあることがデメリットといえるでしょう。
3.触覚センサーの主要メーカー15選
ここでは、触覚センサーの主要メーカーをご紹介します。
| NISSHA株式会社
|
【特徴】 産業資材、デバイス、メディアテクノロジーを中心にさまざまな事業を展開するグローバル企業です。フィルム上のセンサーを取り扱っていて、1mm以下の厚さのフィルムで多点的、多軸的に検出が可能。 |
| ニッタ株式会社
|
【特徴】 1885年創業の建築・土木、物流、半導体など多岐にわたるモノづくり企業です。 オリジナルにカスタマイズしたセンサーを作成することが可能で、測定点数や形状を自由に設計できます。 |
| 株式会社ナノシード
|
【特徴】 ナノシードの触覚センサーPLYON🄬は曲げられた状態でも高感度で、耐久性に優れています。また、柔軟性に富んでいるので従来では触覚センサーが使えなかった場所でも使用することができます。 |
| タッチエンス株式会社
|
【特徴】 独自のセンサー開発から、製品の設計や提案まで行う2011年創業の企業です。 産学官連携でオリジナルのセンサーの開発を行っており、研究段階から試作、量産、販売工程までをワンストップで行っています。 |
| 株式会社オーギャ
|
【特徴】 静電容量式センサーを中心に、入力機器などのセンサーシステムの設計・製造・販売を行っている会社です。 |
| 株式会社細田
|
【特徴】 ロボット用圧力センサーやマットセンサーの開発・製造・販売を行っているセンサーメーカーです。 マットセンサーを用いて防犯や危険防止などにも取り組んでいます。 |
| 株式会社マルサン・ネーム
|
【特徴】 1968年創業のセンサーやシートスイッチのメーカー。シート状の薄型感圧センサーを取り扱っていて、耐久性にも優れています。また、用途や目的に応じて研究・開発・製造まで行っています。 |
| 株式会社アキュレイト
|
【特徴】 ばねや各種精密スプリングの製造・販売をしている会社です。 アキュレイトの製造している触覚センサーは、はんだ付け不要で貼り付けるだけで使用可能です。 |
| 有限会社イーダブルシステム
|
【特徴】 センサーを使った電子機器などの開発・製造・販売を行う会社です。開発をした触覚センサーは日本やアメリカ、中国、韓国で特許を取得しています。 センサーはシート上でロボットアームに貼り付けて使用することができます。 |
| イナバゴム株式会社
|
【特徴】 ゴム製品の設計・製造を行う会社です。 絶縁体のゴムに導電性材料を混ぜることで、圧力によるゴムの弾性によって抵抗値が変化する感圧導電性ゴムを製造していて、すべり覚センサーに応用されています。 |
| XELA・Robotics株式会社
|
【特徴】 2018年に設立した触覚センサーの技術を活用したハードウェアとソフトウェアを取り扱う会社です。 配線を最小限に抑え、薄くて柔らかく、かつ丈夫な3軸触覚センサーを製造しています。 |
| Pressure Profile Systems, Inc.
|
【特徴】 触覚センサー等を取り扱っているアメリカの会社です。 圧力を面でとらえる高分解能・高感度なセンサーを取り扱っています。シート状なので変形させた状態でも測定でき高圧・高温の状態でも対応できます。 |
| 株式会社 FingerVision
|
【特徴】 触覚センサーにカメラで取得した画像情報を組み合わせてより高精度な、力やすべりを取得できます。 |
| モーションリブ株式会社
|
【特徴】 2016年に創業されたセンサーの開発・製造・販売を行う会社です。 モーションリブのリアルハプティクス®︎では、力センサーを用いずにロボットの制御を行います。人の力加減のデータを抽出してそのデータをもとにロボットの制御を行います。 |
| 株式会社レイセンス
|
【特徴】 2020年に創業されたセンサー・ロボットの製造・販売を行う会社です。 レイセンスでは人間の神経系にも備わっているイベントドリブン応答システムを触覚センサーにも採用することで多様なセンサーを使用してもタイムラグが生じにくいシステムを提供しています。 |












4.触覚センサーに関するご相談は株式会社FAプロダクツへ
FAプロダクツは年間200台もの実績がある関東最大級のロボットシステムインテグレーターです。一貫生産体制をとっており、設計から製造までをワンストップで対応。費用・時間にムダなく最適化を行うことができます。
触覚センサーについても、ぜひご相談ください。

お打ち合わせから原則1週間以内に「お見積りとポンチ絵」をご送付いたします。
【ポンチ絵とお見積りのサンプル】
テキストやお電話だけでは伝わりづらいゴールイメージを共有し、スピード感を持った対応を心がけています。
また、同社の「画処ラボ」では、画像処理を用いた外観検査装置の導入に特化し、ご相談を受け付けています。従来は目視での官能検査に頼らざるを得なかった工程の自動化をご検討の際などにご活用ください。
業界最大級の画像処理検証施設を開設!
「画処ラボ」ではルールベースやAIの画像処理を専門エンジニアが検証。ご相談から装置制作まで一貫対応します。
| 所在地・連絡先等 | 営業品目 | 実績 |
| 茨城県土浦市卸町2丁目13-3 TEL.050-1743-0310(代表) FAX.050-3156-2692(代表) https://jss1.jp/ |
・産業用ロボット ・生産設備合理化・省力化の設計及び製作 ・基板電気チェッカーや貼合・折曲など ・治具の設計・製作 |
NM社(電子部品の製造販売)、HS製作所(情報通信・社会産業・電子装置・建設機械・高機能材料・生活の各システム製造販売)、TT社(ショッピングセンターなどリテール事業)、SM社(自動制御機器の製造・販売)、OR社(自動車安全システムの製造販売) |
関東最大級のロボットシステムインテグレーター 生産設備の設計から製造ならお任せください
050-1743-0310 営業時間:平日9:00-18:00

