
自律走行搬送ロボットAMRとは?AGV、センサ、主要メーカー
工場や倉庫では、省力化・効率化のためにロボットの導入が進み、その台数は年々増加しています。
そこで、物の持ち運びのための無人搬送車(AGV)が活躍し始めたものの、搬送車の交通整理や障害物の対応などの管理のために人手が必要でした。そして登場したのが、自律走行搬送ロボット(AMR)です。
このコラムでは、AMRの構造や動作原理、主要メーカーなどを紹介します。
もし、AMR(自律走行搬送ロボット)のコンサルティングを受けて、
・省力化、省人化してコストダウンしたい
・生産性アップして売上を上げたい
・人的ミスを減らして品質価値を高めたい
・どのメーカーの自動化設備を使えば効率的かわからない
という場合は、お気軽に株式会社FAプロダクツまでお問い合わせください。
関東最大級のロボットSIerとして、最適化のご提案をさせていただきます。
目次
1.AGV(無人搬送車)とAMR(自律走行搬送ロボット)

ここでは、AGV(無人搬送車)とAMR(自律走行搬送ロボット)について説明します。
(1) AGVとは|無人搬送車
AGV(automatic guided vehicle:無人搬送車)は、JIS D 6801 で「一定の領域で自動で走行し、人以外の物品の搬送を行う機能を有する車両で、道路交通法に定められた道路では使用しないもの」と定義されています。
なお、JISの無人搬送車には、AMR(自律走行搬送ロボット)も含まれています。
また、AGVを1台から複数台まで管理・制御する装置と組み合わせたものを、無人搬送車システムと呼びます。
図1では、AGVが移動するイメージを紹介しています。
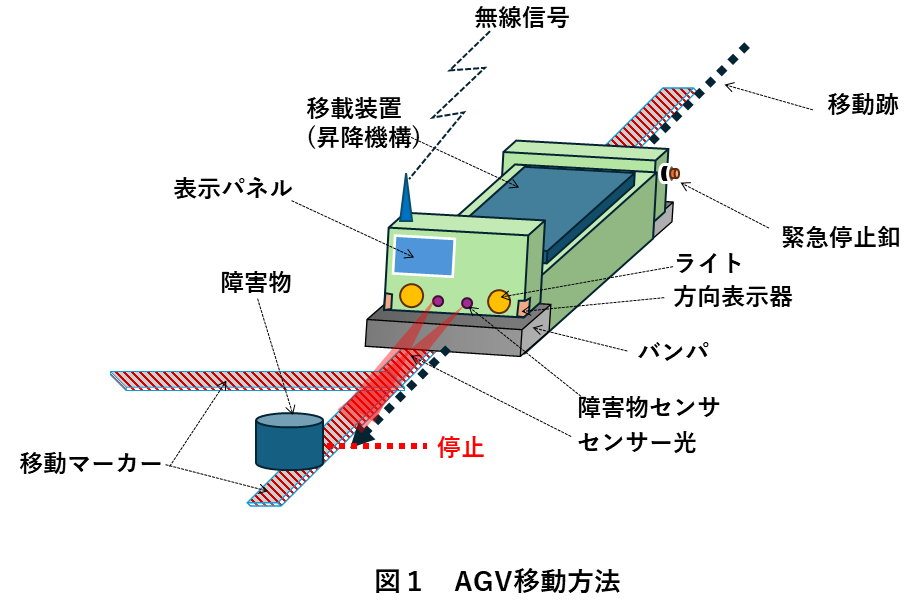
AGVを構成する主な設備は、以下の通りです。(図1参照)
| ガイドセンサ | 床に設置されたマークを検出して、無人搬送車がマークに沿って進みます。 |
| 障害物センサ | 進路上に障害物があれば、その前で停止します。 |
| AGVの運用方法 | 上位システムからの指示によって動く。または、AGVのパネルから内部の制御機に人が指示を入力する |
| 緊急停止釦 | AGV運用上システム障害が起きたときなどに、人が停止させるスイッチです。 (機械の緊急停止は、JIS B 9703 に規格が定められています) |
(2) AMRとは|自律走行搬送ロボット
AMR(autonomous mobile robot)は、自律走行搬送ロボットと呼ばれ、AGVを自分の判断で走行できるようにしたロボットの一種です。
AMRはJIS D 6801規格に従います。
また、走行に関しては基本的に「無人搬送車システム−安全通則」(JIS D 6802)に従います。
図2は、AMRが移動するイメージです。
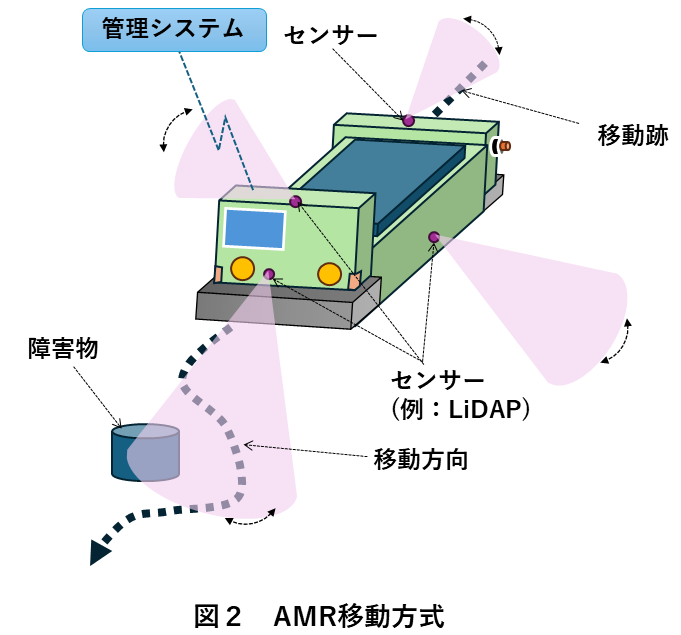
AMRの構成は、図1のAGVに加えて、自走するための設備を加えたものです。
JISでは「無人搬送車自身の自己位置推定機能や走行制御機能などにより、軌道・誘導体・人の操縦がなくても目的地へ移動する方式」と定義しています。
自走のための設備は制御プログラムを含め、次の通りです。
| センサ | 周囲の環境を知るためのセンサで、周囲を常にモニタリングします。(例:LiDAR) |
| 走行方式 | SLAMというプログラム制御で、自己の位置と目的位置と周囲の環境を地図に表します。目的位置にたどる経路を探し、計算結果に沿って走行します。 |
| 危険回避 | 経路中の障害物や他のAMRなどとの接触を避けるよう、経路を選定します。 図2では、目的地までの経路上に障害物をみつけると、走行できる経路を探し、障害物を回避して走行します。 |
以下では、AMRに関する動画を紹介します。
また、無人搬送車については、以下の記事も参考になります。

2.AMR(自律走行搬送ロボット)の構成と動作原理

ここではAMR(自律走行搬送ロボット)の規格やセンサから動作原理まで、解説します。
(1) AMRの規格
AMRの規格は以下の通りです。
・JIS D 6801(無人搬送車システムに関する用語)
・JIS D 6802(無人搬送車及び無人搬送車システム-安全要求事項及び検証))
AMRは規格の内容をクリアし、安全に場内を走行できるようにしています。
(2) 自己位置推定のためのセンサ
AMRは、設置されているセンサ情報から自己車両の位置と姿勢を推定します。
センサの種類は以下の通りです。種類によって自己位置推定方式が変わります。
➀ レーザ測距式
AMR上のレーザレンジファインダで、壁などの障害物に設置した反射板までの距離を測り、現在位置を推定する方式です。AMRが障害物からどれだけ離れているかを測定します。
測定距離は20m以下で、水平60°までが測定範囲です。
② 画像式
AMRに設置した距離計測ができるカメラで壁や柱までの距離を計測し、自己位置を推定します。
測定距離は100m以下で、水平180°までが測定範囲です。
③ レーザレンジファインダ式 / Lidar(Light Detection and Ranging)式
Lidarは、レーザ光をパルス状に方向を変えながら照射し、物体に反射させて返るまでの時間を計測して物体までの距離や方向などを測定します。
測定距離は300m以下で、水平360°測定範囲があります。
Lidarについては以下の記事で詳しく解説しています。
(3) AMRのマッピング
SLAM(Simultaneous Localization And Mapping:自己位置推定と環境地図の作成)は、センサによって壁や柱などまでの距離を計測し,周囲の環境地図を作製し、環境地図上のどこに自己AMRが位置づけされるかを推定する方式です。
センサの種類によって、作成されるマップの精度や正確さが異なります。
上記➀~③の各センサの性能を比較すると、Lidarを用いたSLAM方式のマップが正確と精度の上では有利です。
一方で、AMRが走行するためのマップを作成する範囲が狭く、障壁なども少ない場所であれば、高価なLidarセンサを使わなくともレーザ測距式でも十分と考えられます。
AMRがどのような場所で運用されるか、投資コストの大きさなどを考慮し、➀~③のセンサとSLAMを併せたAMRシステムを構築します。
(4) AMRの動作原理
図3はAMRの走行イメージです。
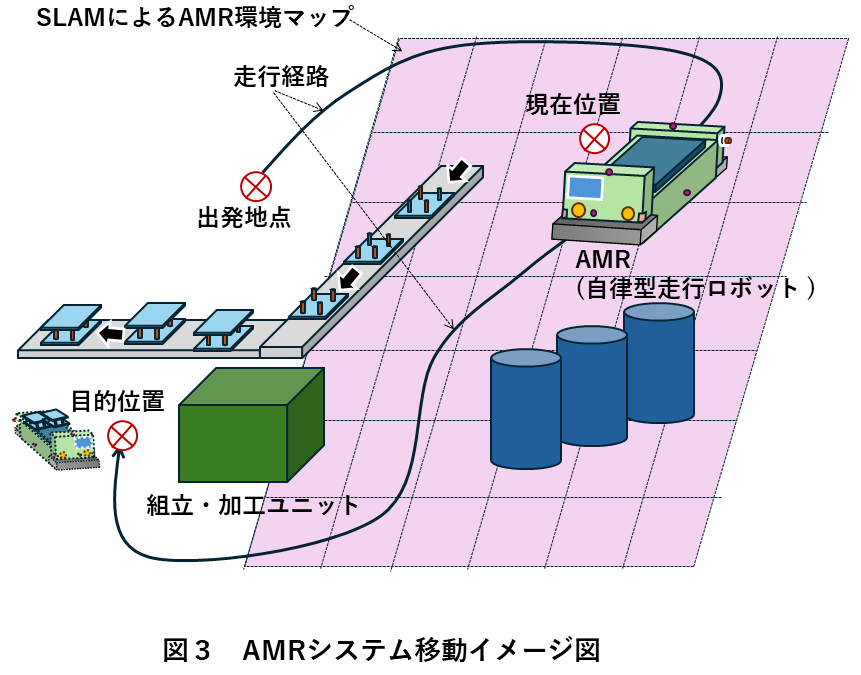
まず、AMRはセンサによって周囲四方向の障壁物を検出し、検出した情報からSLAMによって周囲環境のマップを描きます。
図3のピンク色のエリアが、計算で得られたマップです。図は2次元で書かれていますが、実際は3次元でマップが作成されます。例えば障害物として3基のタンクや床の曲り・傾きなどの情報も含めた3次元マップになります。
AMRはこのマップを使い、周囲の障壁に接触せずに目的地に行ける方向・角度を計算し、最適なルートを割り出して走行します。
また、走行開始後も常に周囲環境のモニタリングと再計算を繰り返し、マップを更新しながら最適経路を選択します。
3.JIS規格におけるAMRを安全に導入するポイント

AMR導入に当たっては、安全性が確保されていることが必要で、国際規格ISO3691-4に規格が定められています。
日本では、従来のAGVの規格JIS D 6802が2022年に改正され、ISOに沿った無人搬送車や無人搬送システムの安全規格に適用されるように改正されています。
JIS D 6802:2022では、AVRロボット導入に当たっては、次のような規格をクリアすることが必要です。
【安全要求事項】
・車両運転区域を設けます。
・気候条件を設定します。
・使用電気の条件を設けます。
・余分な蓄積エネルギーの放出を行います。
・鋭利な角から人を守る対策を取ります。
・人に接触しないガードと、外れたときのインターロック機構を設けます。
・変速機、電気からの保護、圧力検知、油圧、空気圧などの設備は、それぞれ定めらえたJIS規格に従います。
・自動再始動の防止を行います。
※インターロックが解けたときに、自動で起動することが無いようにすることなど。
・人の足を保護する構造とします。
【ブレーキシステム】
電源断、速度制御不良、製造コンセプトから外れた走行時に作動するブレーキシステムとします。
【速度制御】
いろいろな場面で設定する速度を超えない速度制御とします。
【バッテリの自動充電】
充填のポイントと、充電部から切り離された場合の処置を規定しています。
【荷役】
人が荷を積み込むときの安全規制、安全制御の方法を規定しています。
【安定度】
車両の荷役・非常停止・移動中の安定性を維持するための処置と制御について規定しています。
荷物を上げるときの高さの安定度も、500mm以上対応するJISを規定し、500mm以下は計算による安定度を試験します。
【保護装置と保護対策】
非常停止と、運転範囲に人が入ったときの方策を規定しています。
【運転モード】
自動モード、手動モード、保守モードが規定され、各モードにおける設計・設備・人の対応などの要求事項を規定しています。
【制御システムの安全関連部】
制御システムの安全関連部は、ブレーキ・速度制御・バッテリ自動受点・荷役・安定度・非常停止・人の検出・運転モード・警告システム・隔離域へのアクセスについて、JIS-B-9705のパフォーマンスレベルをクリアする必要があります。
ただし、リスクアセスメントによって、制御システムの安全関連部のパフォーマンスレベルを決定できます。
【安全要求事項と保護方策の検証】
AMRの全ての関連機能、自動化機能、警告、人の検出などに対し、意図通りに動作する保証のための検査をする必要があります。
【使用情報の提供】
・機械を使用する上で必要な情報の提供は、JIS B 9700で規定されているように、情報を伝えるようにします。
・一般情報としては信号・警報装置、表示・標識・表示警告、取扱説明書のような付属書類です。
・車両の定期検査・保守の内容と結果や懸案事項を提供します。
・AMRを利用する上での、床面や地面の洗浄度や平面度などの情報、粉塵・氷結などの環境情報を提供します。
【リスクアセスメントの実施】
・AMRを導入するためには、安全についてリスク評価を行い、安全であることを評価する必要があります。
・リスク評価は、「労働安全衛生法」で決められています。
・厚生労働省の「技術革新に対応した機械設備の安全対策の推進事業 報告書」を参考として下さい。
参考:JIS D 6802:2022
4.AMRの主要メーカー3選!
AMRを製作している主要メーカーを3社厳選して紹介します。
(1) 住友重機械工業株式会社 <自律移動ロボット KeiganALI >

【製品の特長】
自律移動ロボット KeiganALI は、人や障害物を回避して走行する自立移動ロボットです。
レーザースキャナーと数台の障害物センサによって周囲のマップを作成して走行します。マップ以外にも床面のラインに対しては搭載カメラでライントレースして走行します。
直管的な操作で簡単に設定できるのも特徴の1つです。
KeiganALIの基本操作は、WEB上に公開しているAPIで完結するため、操作アプリケーションを特注作成する必要がありません。インターネットによって、遠隔地からの操作や設定も可能です。
(2) Gaussy株式会社 <Flexシリーズ>

【製品の特長】
Flexシリーズの自律型ナビゲーションロボットは、オーダーピッキングやトータルピッキングも対応可能なAMRです。
特長1:レイアウト変更不要は、ロボットに合わせたレイアウト変更はせずに、既存のレイアウトえらに導入できます。
特長2:耐荷重アップによって、今までのAMRより少ない台数でピッキングをアシストし、1サイクル分の効率化が図れます。
特長3:オーダーピックから切替トータルピックとする支援によって、客先のシステム改修をせずにトータルピッキングと仕分けが可能となります。
(3) 株式会社マキテック <ROBOT-Vシリーズ>
【製品の特長】
ROBOT-VシリーズのAMRは、多種多様な積載方式に対応する自立走行車両です。
非接触自動充電によって24時間という長時間稼働が可能で、100台までのAMR管理ソフトで制御し、停止位置精度±1cmの精度を実現しています。
ROBOT-Vシリーズは、Navitrol AGVナビゲーションというAMR制御ソフトで、次の機能を実行します。
・環境マップ作成と自律走行ナビゲーション
・様々なタイプのAMRに対応
・障害物回避
・パレット検知
・リフトテーブル/フォークの制御
Navitrolは、2D-SLAMのみで停止位置精度±1cmを実現しています。常に変化する環境情報に対して安定的な自己位置推定を実現するダイナミックマッピング、手動操作でAMRを走らせ壁情報を取得するルート設定などのソフトが特徴です。
5.AMR(自律走行搬送ロボット)に関するご相談は株式会社FAプロダクツへ
FAプロダクツは年間200台もの実績がある関東最大級のロボットシステムインテグレーターです。一貫生産体制をとっており、設計から製造までをワンストップで対応。費用・時間にムダなく最適化を行うことができます。
AMR(自律走行搬送ロボット)についても、ぜひご相談ください。

お打ち合わせから原則1週間以内に「お見積りとポンチ絵」をご送付いたします。
【ポンチ絵とお見積りのサンプル】
テキストやお電話だけでは伝わりづらいゴールイメージを共有し、スピード感を持った対応を心がけています。
また、同社の「画処ラボ」では、画像処理を用いた外観検査装置の導入に特化し、ご相談を受け付けています。従来は目視での官能検査に頼らざるを得なかった工程の自動化をご検討の際などにご活用ください。
業界最大級の画像処理検証施設を開設!
「画処ラボ」ではルールベースやAIの画像処理を専門エンジニアが検証。ご相談から装置制作まで一貫対応します。
| 所在地・連絡先等 | 営業品目 | 実績 |
| 茨城県土浦市卸町2丁目13-3 TEL.050-1743-0310(代表) FAX.050-3156-2692(代表) https://jss1.jp/ |
・産業用ロボット ・生産設備合理化・省力化の設計及び製作 ・基板電気チェッカーや貼合・折曲など ・治具の設計・製作 |
NM社(電子部品の製造販売)、HS製作所(情報通信・社会産業・電子装置・建設機械・高機能材料・生活の各システム製造販売)、TT社(ショッピングセンターなどリテール事業)、SM社(自動制御機器の製造・販売)、OR社(自動車安全システムの製造販売) |
関東最大級のロボットシステムインテグレーター ロボットシステムの設計から製造ならお任せください
050-1743-0310 営業時間:平日9:00-18:00

