

SIerによるロボット解説、安定動作の為の特異点回避方法
目次
1.はじめに
ロボットにアシモというホンダ社の歩行ロボットがいます。なぜか、止まるとき、動くとき、膝を曲げています。漫画の世界のロボットは、膝を伸ばし、さっそうと立ち上がっています。
その差は何かが、特異点という、ロボットを動かすためにできたネックポイントということです。このコラムでは、この特異点について紹介しています。
なお、特異点は、計算の世界からやってきた概念のため、図中に数式が出てきます。このコラムの図に出てくる数式は、図の一種ととらえ、コラムを読んでいただければ幸いです。
もし、ロボットのコンサルティングを受けて、
- 省力化、省人化してコストダウンしたい
- 生産性アップして売上を上げたい
- 人的ミスを減らして品質価値を高めたい
- どのメーカーの自動化設備を使えば効率的かわからない
という場合は、お気軽にFAプロダクツまでお問い合わせください。
関東最大級のロボットSIerとして、最適化のご提案をさせていただきます。
2.ロボットの構造
図1では、垂直間接型のロボットを紹介します。
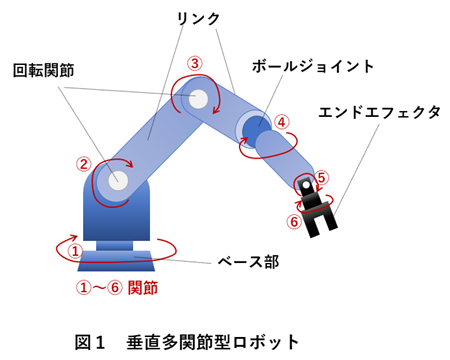
ロボットは基本的に関節とリンクからできていて、リンクとリンクをつなぐものが関節です。ロボットの先端には、エンドエフェクタが接続され、ワークをつかんだり、溶接棒などの加工機が接続されたりします。
3.ロボットの動き
(1) ロボットの動作
図2で紹介する図は、ロボットが初めの位置からワークに対し作業するために、移動したところの図です。
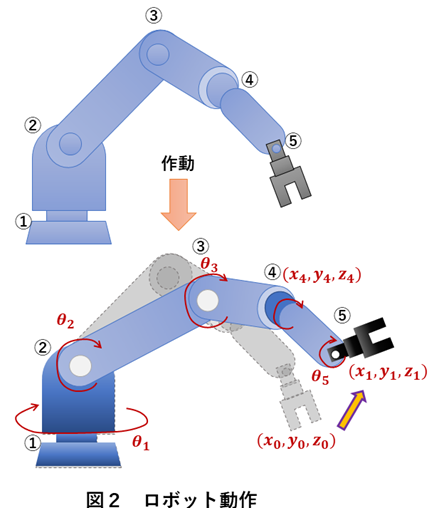
関節型ロボットは基本的に、リンクとリンク間の関節が動くことでロボットの動作となりますが、リンクの長さは変化しません。
したがって、ロボットの動作は、関節の動作だけで移動して、位置が決まります。
図2のロボットが動くのは、①~⑤の5つの関節で、この関節の動きが重なって、ロボットアームの位置が、変わります。なお、関節の動く角度は、①の関節の角度はθ1、のように関連付けています。
図2では、ロボットが図の上側にある状態から、下側の状態に動く様子描いています。ロボットアームの先端は、座標(x0,y0,z0)から(x1,y1,z1)へ移動することを表しています。
(x0,y0,z0)から(x1,y1,z1)へ移動するためのロボットの動作には、2つの方法があります。それは、順運動学方法と逆運動学方法の2つです。
- 順運動学で求める方法
関節変位(回転角度と速度)から、アームの位置・姿勢を求めます。 - 逆運動学で求める方法
アームの位置・姿勢から、関節変位((回転角度と速度)を求めます。
(2) ロボットの関節回転角と先端速度
ここからは、図3のようなロボットの回転角度について紹介します。
図3は数学的な描き方をしていますが、数学的には一切説明を加えていませんので、数式は参考程度に見てください。
ロボットの動きと、次の章の特異点を紹介するためには、数学的な表現がないと難しいと判断し、図3や図4のように、数式を含む図での紹介としています。
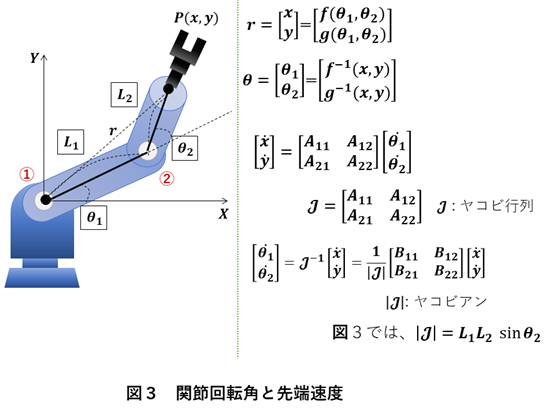
図3では、簡単にするために、関節が2つ、リンクが2つのロボットとして描いています。
図3の数式の中で、X、Yの頭に小さなドット●が付いています。これは、X、Yの速度を表しています。
ロボットアームの位置(X,Y)を求めるためには、順運動学の求め方では、関節の運動(回転角など)から、ある係数を掛けて求めます。この係数をヤコビ行列と言い、Jで表す行列です。(図3の数式の上側の部分)
ロボットの運動については、逆運動学の求め方の方が、求めやすいと言われています。
したがって、ロボットのアームの位置は、関節の角度から求めるために、θ1とθ2の速度は、ロボットアームの位置の速度に係数を掛けて求めます。(図3の数式の下側の部分)
このときの係数の中に、Jを絶対値マークで囲んだものが、1/|J|としてありますが、|J|はJの行列式で、ヤコビアンと言います。ヤコビアンは1つの数式です。
4.特異点とは
図4では、ロボットの特異点についてご紹介します。
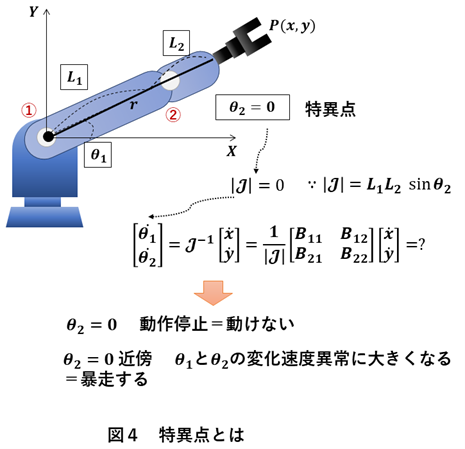
図4の中にθ2=0が特異点と書いてあるため、図3では角度があったθ2がゼロになるところだなと気付かれたと思います。
では、なぜ?
ロボットアームを動かすために関節を動かしますが、関節の速度は、位置の速度に係数を掛けたものと紹介しました。
その係数の中にヤコビアンの逆数、1/|J|、があることもご紹介しました。
問題は、ヤコビアン|J|がゼロになったとき、関節の動きはどうなるでしょうか?
これは数学の問題になりますが、ゼロ割をすると、コンピュータはフェールしますし、数学的には解がありません。
もう一つの問題は、ヤコビアン|J|がゼロ近傍の値をとったとき、1/|J|は、非常に大きな値になります。それは関節角度の速度が異常に大きくなることを意味し、いわゆるロボットアーム部の暴走という状態です。
図4のヤコビアン|J|の値は、図4にも書いていますが、|J|=L1×L2×sinθ2、という式になります。このことはθ2がゼロになると、ロボットは停止しそれ以上動けないことを意味します。
また、θ2がゼロ付近にあると、ロボットの暴走という事態になります。
なお、θ2=0という状態は、リンクL1とL2が直線状になったときです。
このθ2=0という状態になる点を、特異点と言います。
5.特異点を避ける方法とは
特異点を回避する方法は、ヤコビアンをゼロにしないことです。そのような動作をさせない、操作しないことが基本となります。
以下、基本的な回避方法をご紹介します(大学関係では、数値解析として研究している場合もありますが、以下の回避方法には含んでいません)。
- 図4のようにθ2=0とならないように回避行動をプログラミングします。
- これは関節の角度がθ2=0の近くに来たら、別の動きをするようにティーチングのときにロボットに教え込みます。
- ロボット停止時には関節を曲げて停止させます。
- 特異点対策が取られたロボットを使います。
ロボットメーカーでは独自に特異点回避するような構造、冗長化など工夫を凝らしています。
6.ロボット関連の特異点に関しての技術紹介
作業ロボットの特異点に達することを避けるには、技術だけでなく、経験と実績が必要です。
この章では、作業ロボットの経験が深いメーカーなどの関係会社が、特異点に対しての対応などの実績についてご紹介します。
①株式会社FAプロダクツ

【所在地】
茨城県土浦市卸町2丁目13-3
TEL.050-1743-0310(代表)
FAX.050-3156-2692(代表)
https://jss1.jp/
【特徴】
FAプロダクツ社は、ロボットシステム導入を支援するエキスパートです。
ロボットが正しく動作させるためには、ロボットシステムの組み込みが必要ですが、ロボットには特異点という難しい現実があります。そのような特異点対策は数々経験し、対応を重ねてきました。FAプロダクツ社は、ロボットを導入する工場現場を実際に見て調査し、課題を分析し、設計から製造・メンテナンスまで一貫体制を整えて客先に提示します。
FA・ロボットシステムインテグレータ協会の会員であり、FAプロダクツ社の掲げる「コネクテッドエンジニアリング」構想によってFA・ロボット業界の未来を牽引しています。
また、お打ち合わせから原則1週間以内に「お見積りとポンチ絵」をご送付。
【ポンチ絵とお見積りのサンプル】
テキストやお電話だけでは伝わりづらいゴールイメージを共有し、スピード感を持った対応を心がけています。
図は、同社事例の1つ「リード線はめ込み装置の製造事例」です。
また、FAプロダクツ社は、画処ラボ(ガショラボ)を運営しています。
画処ラボは、メーカー横断での機器選定から判断プログラムの選定及び装置の設置構想までを⼀括で提案し、設置からサポートまで⼀元管理する仕組みです。
その特徴には、カメラ機器をマルチメーカーから選定できること、検討から設置までトータルインテグレーションができること、ルール型画像処理からAIによる画像処理まで幅広く対応が可能ということがあります。
FAプロダクツ社によるサポート体制は、遠隔サポートの導入により、トラブル時の迅速な初期対応が可能です。
業界最大級の画像処理検証施設を開設!
「画処ラボ」ではルールベースやAIの画像処理を専門エンジニアが検証。ご相談から装置制作まで一貫対応します。
②株式会社デンソーウェーブ
【所在地】
愛知県知多郡阿久比町大字草木字芳池1番
TEL:0569-49-5000(代表)
https://www.denso-wave.com/ja/
【事業】
自動認識装置、産業用ロボット、プログラマブルコントローラ等の機器やシステムの開発・製造・販売
【ロボット事業例】
同社が開発するVPシリーズやVSシリーズは、特異点回避機能を備えています。特異点やその近くを通過するときに特定の軸が瞬間的に急動作して、速度オーバやソフトリミットオーバのエラーが起きないように工夫されています。
図は、デンソーウェーブ社の特異点回避機能図です。

(引用:デンソーウェーブ・特異点回避)
③株式会社不二越(商標:NACHI)
【所在地】
東京都港区東新橋1丁目9番2号汐留住友ビル17階
TEL:03-5568-5111
https://www.nachi-fujikoshi.co.jp/index.htm
【事業内容】
●マシニング事業
切削工具、塑性加工工具、切断工具、工作機械、機械加工システム
●ロボット事業
ロボット、ロボットシステム
●機能部品事業
ベアリング、油圧機器、カーハイドロリクス
●マテリアル事業
特殊鋼、コーティング、工業炉
【ロボット事業】
6軸ロボットの場合、ロボットが動作する軌跡上に特異点姿勢があっても回避するための動作ポイントの追加が困難です。
一方、同社が開発する7軸ロボット「プレストMR20」の場合、自由度に余裕があるため、簡単に特異点姿勢の回避できます。次の動作に移行する姿勢が最適となるように簡単に設定でき、ロボットの動作がスムーズになることで、ラインタクトの短縮が可能です。
(参考:NACHI・NACHI TECHNICAL REPORT Vol.15 Feb.2008 p.4)

(引用:NACHI・MRシリーズ MR20/20L・動き自在、7軸“腕”ロボット)
④株式会社安川電機
【所在地】
北九州市八幡西区黒崎城石2番1号
TEL:(大代表) 093-645-8801
https://www.yaskawa.co.jp/
【事業内容】
■モーションコントロール
・ACサーボ・コントローラ事業
・インバータ事業
ACサーボ・コントローラ製品は電子部品や半導体部品などの高い精度が求められる生産機器に組み込まれています。
インバータは大型空調やエスカレータ・エレベータなどの社会インフラで使われ、省エネに貢献しています。
■ロボット
・アーク溶接ロボット
・スポット溶接ロボット
・塗装ロボット
・ハンドリングロボット
・半導体・液晶製造装置用 クリーン・真空搬送ロボット
垂直多関節ロボットを主力製品として、自動車関連市場を中心にさまざまな分野の生産現場にて溶接・塗装・組立・搬送などの自動化に貢献しています。
【ロボット事業例】
同社が、特異点となる姿勢を多く回避するロボットとして開発しているのがMOTOMAN-SP100Bです。7軸垂直多関節ロボットであるこのロボットは、従来のものよりも動ける領域が広いため、よりスピーディに作業を行うことができます。また、給電ケーブルが1本化され、メンテナンスしやすいのも特徴です。
(引用:安川電機・スポット溶接・7軸垂直多関節 : MOTOMAN-SP100B)
⑤株式会社MUJIN(Mujin, Inc.)
【所在地】
東京都江東区辰巳3-8-5
TEL : 03-4577-7638
https://www.mujin.co.jp/
【事業内容】
知能ロボットコントローラ「MUJINコントローラ」の開発・販売事業
物流向けロボット事業
FA向けロボット事業
モバイルロボット事業
【ロボット事業例】
同社では、独自開発した知能ロボットコントローラ「MUJINコントローラ」を開発しています。
モーションプランニング搭載でロボットをティーチレスにする際、従来方法では「ロボットの干渉や特異点や回避しながら、経由点ポイントをひとつひとつ教える必要がある」「特異点や関節リミットをマニュアルで回避する経験が不可欠」といった課題がありました。
しかし、「MUJINコントローラ」を用いれば、最小限のティーチングポイントのみで対応でき、さらにティーチングではできなかったロボットのなめらかな動きも可能となっています。また、世界初の自動干渉回避機能を搭載しているため、ほとんどのロボット動作を自動生成できます。
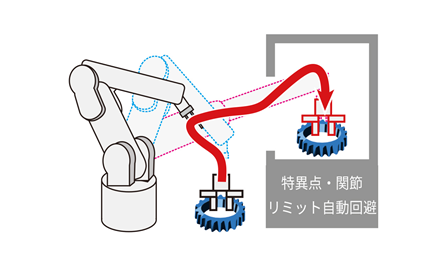
(引用・MUJIN・MUJINコントローラ)
7.おわりに
ロボットは便利な機械です。人に代わって、人が持てないような重量物の搬送や、細かい溶接まで引き受けます。
一方、制御が効かないと、人にとっては非常に危険な存在になります。ロボットの特異点もその一つでしょう。
しかし、その特異点も人が作り出したものです。ロボットが効率よく動けるように人が計算法を工夫した結果、生まれたネックポイントと言えます。
計算で生み出した危険なら、計算で危険を回避できるはずです。もちろん複雑な計算であると、回避方法も複雑になるかもしれませんが、対応は可能でしょう。同様にロボットの特異点が自然発生的に生まれた危険なら、人には対処方法が難しいかもしれませんが、人が書いたプログラム上で生まれたものは、プログラムで回避できるのです。
とはいえ、ロボット導入後に、「そのような姿勢をとるのか!」、というケースもあり、そのため特異点ができたと悩むロボット担当者もいるでしょう。その際は、ロボット経験と技術力が深いメーカやティーチングを行う部門に気軽に相談することをおすすめします。
FAプロダクツでは、ロボットシステムによる自動化によってスマート工場を目指す製造業を支援しております。お気軽にFAプロダクツへご相談ください。
関東最大級のロボットシステムインテグレーター ロボットシステムの設計から製造ならお任せください
050-1743-0310 営業時間:平日9:00-18:00

